机车空调逆变电源控制系统及其实现
引言:
随着电力电子学科的发展,逆变器控制技术与工业现场总线应用范围越来越广,本系统成功应用这两项技术,设计了电源用逆变器控制系统。原有空调电源逆变器控制系统的缺点是:不能根据设定温度控制空调机组变频运行,体积大,各逆变器协调控制困难。本文设计了一种机车空调机组用多逆变器控制系统,与原有空调电源逆变器控制系统相比,有体积小、重量轻、数据交换方便、运行可靠、利于维修等优点。
1 系统工作原理:
由图1可知,上位微机控制电路是该系统的核心控制部分,通过总线将控制指令传给逆变器控制电路,逆变器控制电路根据控制指令产生不同频率的SPWM信号控制逆变器工作;逆变器控制电路将各逆变器实际工作状态、故障信号等通过CAN总线上报给上位微机控制电路。
图1 逆变器控制系统结构图
2 逆变器控制电路及控制方案
2.1 逆变器控制电路
逆变器控制芯片选用凌阳科技公司2005年推出的新一代16位单片机SPMC75F2413A。其内部集成了能驱动电机的PWM发生器、多功能捕获比较模块、BLDC电机驱动专用位置侦测接口、两相增量编码器接口等硬件模块,以及多功能I/O口、同步和异步串行口、ADC、定时计数器等功能模块,利用这些硬件模块支持,SPMC75可以实现诸如家电用变频驱动器、标准工业变频驱动器、多环伺服驱动系统等复杂应用。SPMC75F2413A集成了两个电机控制PWM输出定时器—MCP(Motor Control PWM)定时器:MCP3、MCP4。每一个MCP定时器都可以独立输出三相六路的PWM波形,非常适合于控制交流感应电机、无刷直流电机等各种电机。选用此款单片机可极大缩小控制电路体积,从而减小整个空调电源的体积,增加系统的集成性和可靠性。本系统选用定时器MCP4输出SPWM信号。
2.2 SPWM脉宽调制信号的产生
实行SPWM脉宽调制时,在一个调制信号(正弦波)周期内所包含的三角载波的个数称为载波频率比N(亦即载波比)。在变频过程中,即调制信号周期变化过程中,每个调制信号周期内载波个数不变的调制称为同步调制,载波个数相应变化的调制称为异步调制。同步调制在输出频率很低时,由于相邻两脉冲间的间距增大,谐波会显著增加,使负载电机产生较大的脉动转矩和较强的噪声,发热量增加;另外,这种调制由于载波周期随调制波周期连续变化而变化,在利用微处理机进行数字化技术控制时,带来极大不便,难以实现。为此,本逆变器采用异步调制原理,避免了上述现象的发生。
在实际工程中,为方便单片机控制,采用查表法生成SPWM脉宽调制信号。应用工程软件Matlab编程计算所需正弦表,将一个周期正弦波分成4096个数据,预先存入单片机存储区中。由MCP4定时器产生周期溢出中断,并在该中断的中断服务程序中读取正弦表中的一个数据点,每次查表后正弦表指针加1,满周期后循环查询,一个MCP4定时器周期等于一个SPWM载波周期。根据冲量等效原理(大小、波形不同的窄脉冲变量作用于惯性系统时,只要它们的冲量即变量对时间的积分相等,其作用效果基本相同)可知,载波频率越高,逆变器输出SPWM波谐波含量越小,越接近正弦波。但是载波频率受开关器件(IPM)本身开关能力的限制,开关频率越高,器件发热量越大。综合考虑器件开关损耗和输出波形质量的要求,通过设置定时器周期寄存器(P_TMR4_TPR)确定一个载波周期为6000个系统周期,若系统时钟频率为24M,则载波周期为4K。单片机定时查询CAN总线传来的频率给定信号,计算出查正弦表时所用的步进值(查表时所用的步进值越大,输出SPWM波形频率越高)。查表所得值被载入比较匹配寄存器(P_TMR4_TGRA、P_TMR4_TGRB、P_TMR4_TGRC),与定时器计数寄存器值比较输出不同脉宽的调制波,具体原理如图2所示,当定时器计数寄存器计数值(P_TMR0_TCNT)与比较匹配寄存器(P_TMR0_TGRA)值相等时输出信号产生电平 翻转。查表时A、B、C三相通过引入数据表地址指针偏移量实现三相互差波形输出。
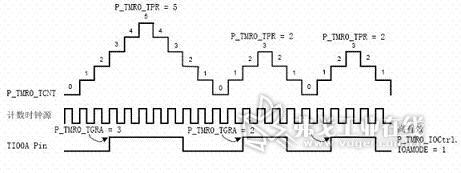
图2 脉宽比较输出原理图
通过定时查询CAN总线传来的工作模式给定信号,逆变器可输出不同频率的SPWM波,准确控制空调机组工作模式。逆变器输出波形如图3、图4所示。
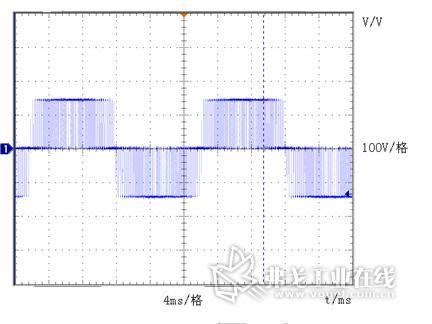
图3 未滤波逆变器输出波形
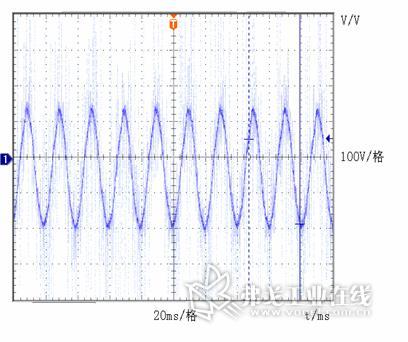
图4 滤波后逆变器输出波形
3 通讯系统控制方案
为了适应机车上复杂的电磁环境,满足逆变器控制系统通讯的要求,本系统中使用工业现场总线(CAN总线)进行控制信号、反馈信号的传输。
CAN总线特点:
◆ CAN采用多主方式工作模式,网络上任一节点均可在任意时刻主动地向网络上其他节点发送信息,而不分主从。
◆ CAN采用非破坏总线仲裁技术。当多个节点同时向总线发送信息出现冲突时,优先级较低的节点会主动地退出发送,而最高优先级的节点可不受影响地继续传输数据,从而大大节省了总线冲突仲裁时间。
◆ CAN节点只需通过对报文的标识符滤波即可实现点对点、一点对多点及全局广播等几种方式传送接收数据。
◆ CAN的直接通信距离最远可达10km;通信速率最高可达1Mbps。
◆ CAN的每帧信息都有CRC校验及其他检错措施,具有极好的检错效果。
◆ CAN的通信介质可为双绞线、同轴电缆或光纤,选择灵活。
◆ CAN节点在错误严重的情况下具有自动关闭输出功能,以使总线上其他节点的操作不受影响。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论