实现L5级别自动驾驶的十八层地狱闯关
文章来源: 汽车电子与软件
发布时间:2020-11-06
说L5什么时候到来,可以很快,也可以很慢,关键就是L3什么时候到来,当L3到来,L5的到来可能就非常快了,而L3可能会经历非常长的时间,为什么?
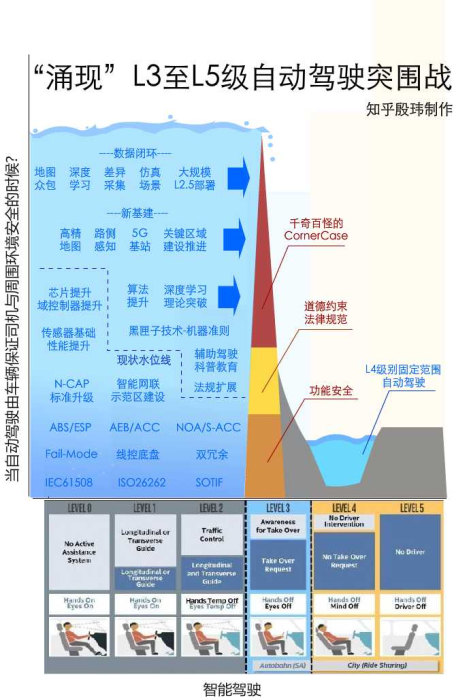
还是按照我一贯的习惯,先上"一张图解释" L5的难点到底在哪里?
说L5什么时候到来,可以很快,也可以很慢,关键就是L3什么时候到来,当L3到来,L5的到来可能就非常快了,而L3可能会经历非常长的时间,为什么?
因为本质上L3的一个点在更大范围内达到“eyes off”的水准。这将引发包括技术,安全性,道德,法律,国家安全等多个维度共同的阻力点,哪怕其中一个没有打破,对L3的推进都是非常有影响的。
这就和上图在L3位置的水坝是一个逻辑。虽然由于智能网联示范区的建立,以及安全员的配置,在L4级别实际是有一个小水塘的,因为这些机制保证了在法律,安全和道德层面不被过多调整,哪怕发生一些安全事故,一般自动驾驶的实施方更多也会愿意承担对应的后果,因此,不存在太多的纠纷,但一般意义上认为L4自动驾驶就到了,应该也不客观。因为L3级突破这个事正在承载的难度有可能远高于L4级别。
但事情也要辩证的看,L3级别正在积蓄的水位,当突破L3级别后,贡献L4级别和以上估计就要顺利的多,基本就是这个状态。
突破这个坝体,整个行业需要下十八层地狱,才能涅槃重生,大家细品下:
过去整车在没有复杂智能功能的时候就有功能安全标准,比如IEC61508。随着智能驾驶的等级提升,智能座舱的功能升级,出现了ISO26262, 甚至面向更复杂的SOTIF标准。
行业内的大家都知道,虽然功能安全做了认证的很多,但确实把功能安全真正用好的还很少,包括SOTIF的可行性也受到部分质疑,这一块面向自动驾驶的功能安全标准,任然不够完善。
第二层面是双冗余,线控底等系统底层构建安全的进一步成熟。
目前量产的域控制器,线控机构很多成本仍然很高,部署并不广泛,域控制器暂时不能支持更多的传感器和模块工作,I/O不足。为了满足功能安全,需要同时有两个同等模块共同作用于系统,执行器电源都需要备份,复杂的链路设计会增加成本,并考验研发的能力,这导致L3-5量产过程中,目前很多的功能都缺少必要的冗余备份。
芯片是个热点话题,特朗普卡这个点是有道理的,芯片是一个巨大的护城河,特别是人工智能芯片,对于提升算力,增加整车的感知力非常重要。受制于算力,很多算法逻辑不可避免的需要被阉割,这些都导致实际研发的功能并不足以获得脱离人之后的安全性。
软件定义汽车对于L3-5技术自动驾驶的推动,并不一定是技术层面的贡献,而更多的是时间上的,自动驾驶系统可能是唯一一个无法在整车开发周期下就能完成的应用,需要通过大量的路试频繁迭代,而这需要整车电气架构调整,并支持OTA后才能支持的功能,这是非常重要的。
目前量产了的毫米波和超声波,相机等的质量尚可,L4用到的激光雷达,通讯单元等设备仍然没有经历过量产实践,很多仍然都不稳定,在一些器件指标上,包括激光的距离,毫米波和相机的分辨率等还有很大的发展空间。另外虽然单纯的看传感器越多越好,但是传感器比我们想象的要更不靠谱的多。
人机交互包括DMS,HOD方向盘,HMI显示等诸多部件,这些都决定了在L3-4级中人和机器的切换问题,相关研究表明大部分的安全事故都发生在机器和人的切换过程中,并且有大量的欺骗行为影响整个系统的安全。
智能座舱对于自动驾驶,很核心的除了增加司机驾驶过程的安全性,最重要的就是可以精准的判断人和机器的切换条件。
从博世发明AEB开始,到ACC,LKW功能,再到目前流行的Pilot功能,NOA功能,除了第一层面的功能安全问题,软件开发的思路也在发生变化,原来通过“面向方法的编程”Matlab / simulink都可以轻松搞定,现在不少辅助驾驶功能开始使用"面向对象"的C++来进行编程,为了支持更为复杂的自动驾驶,以python / pytorch为主流的"可微分编程"方法也逐渐流行起来。基础安全功能,辅助驾驶功能,自动驾驶功能在开发逻辑上存在很大的区别。具体可以看这个回答。这一块的探究虽然借助L4自动驾驶,行业有些积累,但业内看,仍然还有很多不足之处。
N-CAP碰撞测试目前最新标准终于推动了AEB在车上的部署速度,但和排放标准一样,不谈L3-5,目前可以做到L2.5的标准普及都还有非常长的路子要走。北京,上海,长沙各地的智能网联示范区机制非常好,可范围远远不够。很多功能的测试比如NOA功能,仍然缺少更多专业的场地,进行更大范围的验证。
除了特斯拉自己的宣传错误,我们也必须看到人这种生物是非常不理性的,辅助驾驶功能有很多新人并不了解他的ODD,因此付出了很多生命的代价。但这个在社会舆论上会对L3的推动造成不小的影响,当普罗大众对辅助驾驶,自动驾驶有一个正确的理解。自动驾驶的推动会更为顺利。
任何系统都不可能避免安全事故,自动驾驶也是一样,L3级别自动驾驶也面临定责问题,目前车辆普遍都有数据记录功能,但并没有像飞机一样专门配备黑匣子,保证在发生严重事故时,所有信息都被完整记录。另外在完整记录的前提下,还需要像"机器人三原则"一样定义清楚软件覆盖的安全边界,从而给法规上确认责任提供依据,但目前这种级别的安全策略仍然只适用于辅助驾驶级别的应用,突破L3级别的安全事故量化定义标准仍然是没有的。
有黑匣子,有技术层面的定责模型,目前涉及汽车主体确保安全的法律一部都没有,由此造成的问题,是无法可依的。智能网联示范区内的虽然有相关规范定义,但更大范围内,特别是量产发布之后,目前L3-5级别的应用都是被禁止的。
目前自动驾驶几乎所有的深度学习算法基本都基于有监督学习,而有监督学习对于稳定知识结构的抽离,和对数据样本的过度依赖,导致数据样本的错误会污染深度学习模型,从而给系统造成损害,在L3以下,这种错误检测,或者检测遗漏有人作为兜底,但L3以上责任归属模糊的情况下,就需要更好的理论结构和训练方法,来保证模型的稳定性和抗干扰能力。
目前高精度地图从国家安全的角度出发必须进行机密,北京上海中心区域,普通道路等都不允许审图释放,释放区域除了谜一样的扭曲算法,还会加上随机误差,这对于自动驾驶的精确控制来说会成为一个挑战。具体可以看我这个回答
目前L3级别的自动驾驶释放,一般也会从高速公路铺开,除了整车自身的安全考量外,确实在成本约束下,存在车载传感器解决不了的问题,比如事故,异物等的提早识别和预警,因此从整体安全的角度出发,路侧感知,5G通讯技术的发展非常重要,这些设施虽然不是决定性的,但是作为冗余保证,仍然非常必要。
自动驾驶的核心之一就是规划算法的泛化性,其也是唯一一个除了实车和仿真,无法进行开环验证的模块,但是真实环境下的问题千奇百怪,规划需要面对的场景数量多如牛毛。规划除了算法和模型本身需要满足兼容各种场景的需求,另外需要大量的仿真数据进行参数的校准以及版本更新后的递归测试,这是系统性能表现稳定的前置条件,目前仿真系统我个人认为是停滞的,目前没有太多满足要求的系统存在,这个短板等着行业参与方去解决。
道路设施改造看似周期很长,但放到更大范围,这个变更的频率仍然非常可观,L3级别自动驾驶不可能脱离地图运转,因此数据的更新对于高等级自动驾驶都是非常重要的,通过大量部署的车辆对地图进行短周期的更新,直接影响整个系统的成熟度。
面对千奇百怪的场景,系统需要通过在路上真实司机行为的数据进行必要的训练,才能保证功能效果的持续提升,而这个依赖于在车端运行一个监控软件触发的采集训练所需要的必要数据,这个和第十六层的众包地图类似,只是一个面向于记忆型的地图,一个面向行为和感知。
15,16,17的问题,都有一个前置条件,需要2.5级别的自动驾驶车被大规模部署,以产生足够量的仿真场景,地图数据和训练样本,目前只有特斯拉完成了一定规模的部署。而其他车厂在这块仍然较为落后,没有数量的堆积,就无法获得解决千奇百怪问题所需要的必要输入,也就没有办法推倒L3级别的这堵墙。
好吧,我承认十八层地狱是我凑出来的,但的确每一个问题的解决都在提升推倒L3级别,冲向L5的坝体,任何上述问题之间大部分都是且的关系,因此整个系统在L3的推进才会如此困难,L5级别同样的道理。
L5级别是否会到来实际上有点哲学意味在那里,我觉得不会以我们理解的形式到来
低速复杂行驶过程中,司机需要跟人进行互动,比如与另一个司机进行眼神交流、向行人点头示意、或是向骑行者招手让他们先行。谷歌已经在训练汽车学习如何辨别骑行者的手势,但仍旧任重而道远。一辆自动驾驶汽车可能预测一个站在斑马线旁的行人是在等着过马路还是打电话吗?能否区分处理肢体语言的地区差异?可能并不能做到,因为哪怕可以做到,人类还擅长欺骗。
L5级自动驾驶汽车向我们承诺了乌托邦的理想社会:城市不需要宽敞的停车场,不需要红绿灯,但这有个前提,人们更倾向于共享一个按需付费的出租车车队而不是私人购买汽车,这一设想才能实现。即使我们达到了100%的汽车自动化,我们依然不能忽略人在其中的位置。纵使智能自动化的道路交叉口不仅不再需要红绿灯指示,且还能容纳现如今两倍的车流量,但那些非自动化的骑行者又该如何经过这些十字路口?行人们又该如何通过?
无人驾驶汽车的道路安全优势会格外显著以至于非自动化的汽车被法律明文禁止,而我们也惊愕于人类竟曾被托付于驾驶这一职责。但在那一天真正来临前,因为并不是每个国家都有足够的基础设施来保证两个系统的同时运行,我们也将持续面对由此带来的混乱。
人类有一种出奇的能力,那就是让任何系统都能为他们的个人利益所服务。一旦人们使用这种能力,无人驾驶汽车能够解决拥堵的优势极有可能被人类的天性迅速削弱。同样,乘坐无人驾驶汽车越是被打造得具有吸引力,就会有更多的人选择这一交通方式。需求会迅速膨胀,如果你能在一小时之久的车程里也能查看邮件,为什么还要费心去坐火车?如果你能让你的汽车自己开回家停着,为什么还要在市中心付费停车?(来回驾驶会使得高峰时期的车流量翻倍)如果你的汽车能够在你点一杯拿铁的时间里自己绕着街区兜圈,为什么还要费心去找停车位呢?
当这种需求被满足,导致问题3,当不被满足,导致问题2。
最后理论上当所有上述问题都被满足,是否还存在被定义为车的这种工具?
作者:殷玮,上汽集团智能驾驶软件系统经理,
欢迎关注作者知乎,
点击阅读原文,与作者交流、互动。















获取更多评论