紧急情况下的转向避障
文章来源: 同济智能汽车研究所
发布时间:2021-08-04
本文提出了一种紧急避障系统,该系统包括紧急制动控制和紧急转向控制。
在车辆的行驶过程中,安全性永远是放在第一位的。车辆的安全系统分为主动安全与被动安全。车辆的主动安全系统可以通过从车辆的内部状态以及周围状况获取信息,主动执行避免碰撞和减少损害的控制,从而可以保障驾驶员和乘客的生命财产安全。主动避免碰撞的方式有两种,一种是通过制动来实现,被称为AEB系统;另一种是通过转向来实现,被称为AES系统。目前AEB系统已经得到了广泛的应用。AES系统也得到了较为广泛的研究。AEB系统与AES系统都有各自的应用场景以及优缺点。如何AEB系统和AES系统相结合,集成一个更加安全、可靠的系统,如何确定集成系统的触发条件,是研究的重点和难点。
摘要:
本文提出了一种紧急避障系统,该系统包括紧急制动控制和紧急转向控制。 根据自车与周围车辆的相对运动以及通过视觉传感器获得的车道信息,分别计算出制动和转向情况下,避免碰撞的最短距离。对于转向回避控制,通过模型预测控制(MPC)来计算最优控制输入,该MPC满足诸如由周围车辆所建立的安全避让区域以及车辆执行器的能力之类的约束。为了避免由于变道而引起的碰撞,本文还特别考虑了最大横向加速度和轨迹的最大转向角。此外,在避障的过程中突然的横向移动会导致轮胎的非线性特性,因此,本文通过扩展卡尔曼滤波(EKF)来估计轮胎参数以提高模型预测精度。除此之外,本文还分别确定了制动和转向避障的控制干预时间。仿真结果表明,本文提出的AEB和AES相结合的算法不仅可以有效地避免紧急情况下的碰撞,而且自车仍然可以保持在道路边界内的安全性。
车辆的主动安全系统可以通过从车辆内部状态以及车辆所感知的周围的状况获取的信息来执行避免碰撞和减少损害的控制。通过制动来避免碰撞被称为AEB(自动紧急制动),而通过转向来避免碰撞被称为AES(自动紧急转向)。
安全法规(例如Euro-NCAP)将AEB技术当作一项安全功能,并且AEB技术已经被应用在量产车辆中来达到避免碰撞的目的。
就AES而言,目前没有量产产品,但是许多OEM和供应商已经开始研发将AES应用于ADAS和自动驾驶上。此外,由于Euro-NCAP 2020路线图涉及到某些实际碰撞场景下的AES性能评估,因此,AES与AEB相结合的技术有望被应用于量产车中。尽管如此,大多数的避障研究都是独立研究AEB或者AES的。当自车面临复杂的交通场景时,AEB和AES在紧急情况下的触发条件可能会相互冲突。尽管有效避障需要需要上层的判断规则,但是很少有文献研究AEB与AES的集成系统。
本文针对紧急避障设计了AES系统,并提出了触发机制,以确保AES系统在AEB系统无法避障的情况下有效。为了预测周围车辆的轨迹,考虑到传感器的特性,本文将车辆形状描述为椭圆形,并假设车辆的速度在时间步长内保持不变。通过在转向过程中考虑轮胎的非线性特性,可以提高车辆预测模型的准确性。使用非线性车辆动力学模型,通过EKF(扩展卡尔曼滤波)估算出转向刚度的变化。
在AES系统的设计中,代价函数包括跟踪误差和输入尺寸,目标输出包括避障过程中所期望的横向距离和航向角。此外,本文还将安全避障区域和车辆执行器的能力作为MPC的约束条件。考虑到自车避障轨迹的陡峭程度,在设计AES系统的触发规则中提出了TCC指数和最大横向加速度指数。本文还对AES系统进行了仿真,并在各种碰撞场景下与AEB系统进行了比较。仿真结果表明,本文所提出的AES系统可以在传统AEB系统不能避障的情形下有效避障。此外,自车在避开障碍物之后仍能安全地保持在道路边界内。
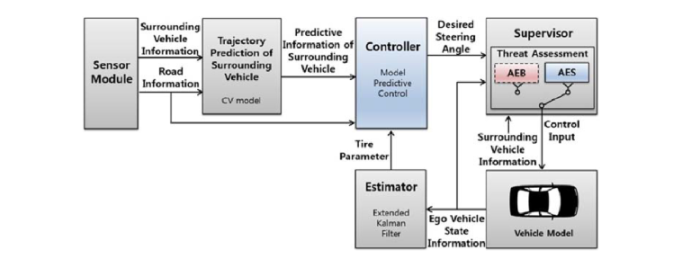
图1是本文所提出的控制系统的全局框架。文章的第2部分描述了相关问题的研究背景。第3部分介绍了自车和周围车辆轨迹的预测方法。第4部分介绍了具有目标函数和约束条件的MPC设计。第5部分介绍了可以有效避障的AEB和AES系统的触发方法。第6部分展示了本文所提系统的仿真结果。
AEB系统是降低交通事故社会成本最有效的方法之一。但是,值得注意的是,存在一些紧急的碰撞是当前AEB系统无法避免的。增添AES系统可以避免某些追尾碰撞。由于AEB和AES系统的优缺点取决于周围车辆的相对运动,因此有必要分别确定AEB和AES系统的碰撞风险和干预时间。
此外,如果在AEB系统起作用期间车辆的减速度是变化的,那么刹车距离也可以作为触发AEB系统的指标。同样地,对于AES系统,最常用的方法是计算触发AES系统的最小TTC。在计算AES系统的TTC时,通常假设车辆在避障过程中的侧向加速度是不变的。因为AES系统应该包括避免碰撞和保持车道的转向动作,所以仅仅基于恒定加速度的避障并不能保证整个避障路径是安全可行的。
在确定何时触发紧急控制的问题上,现有文献探究了寻找最后可能的避障轨迹的方法。所有的无碰撞轨迹都是从车辆的纵向运动和横向运动这两方面考虑的。紧急控制系统的干预时间被确定为避障轨迹存在的最后临界点。但是,这些方法难以应用到集成了(ECU分开运行的)AEB和AES的ADAS系统上。
从AES的转向控制的角度出发,使用路径预测的最优输入设计(基于MPC)得到了广泛的研究。Falcone,Yoon等研究了稳定性约束下非线性车辆模型的最优跟踪问题。Liu,Carvalho等设计了一个具有广义成本函数的MPC框架,包括轨迹误差,车道选择与改变以及危险指数。根据以上指标生成最佳路径后,可以通过加速、制动和转向的组合来实现。Kim等考虑了驾驶员的不相容性,为可能的制动、左转、右转建立MPCs,在避障路径中选择最优的输入。为了设计避障的转向控制器,Erlien等把静态障碍物的边界线描述为环境包络线,同时确定了车辆的安全避障区域。Keller等用安全气泡定义周围车辆的危险区域,当自车进入到安全气泡时执行避障控制。虽然Keller等为基于避障的MPC设计了各种成本函数,但是没能很好地研究制动避障和转向避障的不同特性。
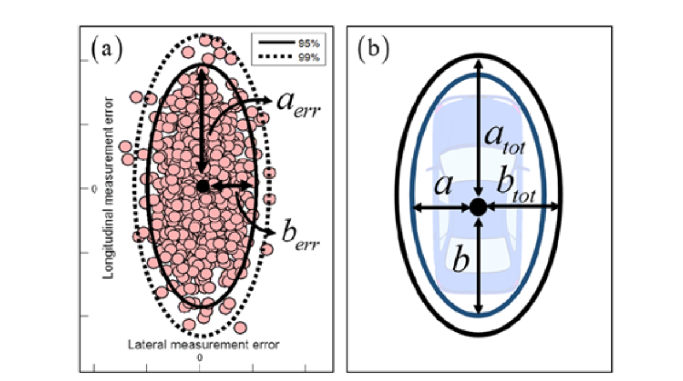
当预计发生碰撞时,安全避障区域可以基于周围车辆和自车的预测轨迹来定义。在本文中,车辆的形状表示为椭圆,椭圆的大小由传感器的特性决定。如果将安装在车辆上的传感器的测量误差假定为随机变量,则在横向和纵向的误差的标准差分别用σx ,σy表示。基于恒定的概率δ,误差椭圆如图2所示,它的尺寸可由下面的公式计算得到。


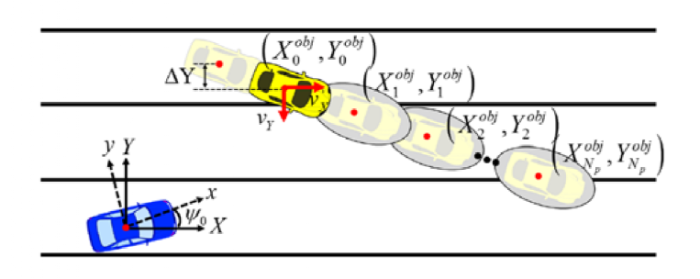
利用自车的全局速度、与周围车辆的相对距离、相对速度以及车道信息来预测周围车辆的轨迹。如图3所示,两个坐标系位于自车的中心。一个是车辆坐标系,x-y,另一个是惯性坐标系,X-Y。从车道信息获得车辆的航向角后,将车辆坐标系的相对距离转换到惯性坐标系的位置上。
为了预测周围车辆在惯性坐标系的未来位置,周围车辆的绝对速度由下面的公式可以计算出。
其中Vxobj和Vyobj是周围车辆在X方向和Y方向的速度,Vxego是自车在X方向的速度,Vx,rel是周围车辆的相对速度,ΔYobj是周围车辆在一个采样周期内的横移距离,Tsen表示车载传感器的采样周期。
在上面的公式中,Vxego近似作为车辆在惯性坐标系中的车速,主要是因为自车主要沿着车道行驶。假设公式(4)中的速度在预测范围内是恒定的,周围车辆的未来位置可以用公式(5)来预测。
式中,Xkobj和Ykobj是周围车辆在k步后的X坐标和Y方向的坐标,Np是预测的时间步数,Ts 是控制时间步数。
为了确定安全避障区域,可以使用公式(6),将预测车辆在惯性坐标系上的坐标转化为车辆坐标系上的坐标。
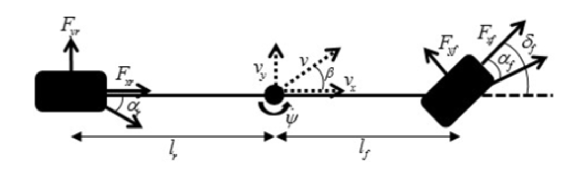
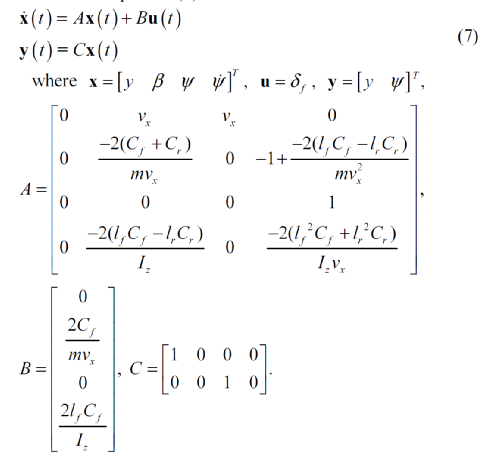
对于避免运动车辆的碰撞问题,在预测自车在预测范围内的状态很有必要。如图4所示,二轮自行车模型用来预测自车的横向运动。因为转向避障涉及到极度转弯问题,需要考虑轮胎的非线性特性。因此在式(7)中假设了时变的转向刚度。
假设在一个时间步长内,轮胎参数已更新且保持不变,式(7)中预测模型可以被离散化表示。如式(8)所示。
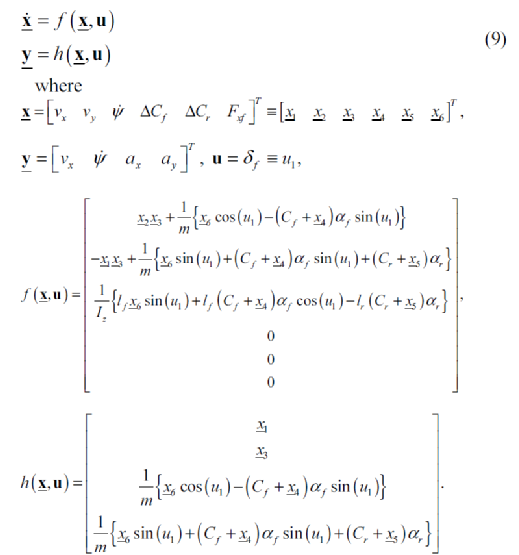
为了考虑在紧急转向过程中轮胎的非线性特性,在预测模型中,利用公式(7)可以估计和更新轮胎参数。虽然轮胎的非线性特性可以通过实验来研究(例如魔术公式),但在本研究中,转向刚度被定义为额外的状态变量,可由下面的动力学公式计算而得。
上式中,前后轮侧偏角可以通过测得的速度和横向加速度计算出来。公式(9)离散化为离散形式后再使用EKF方法。
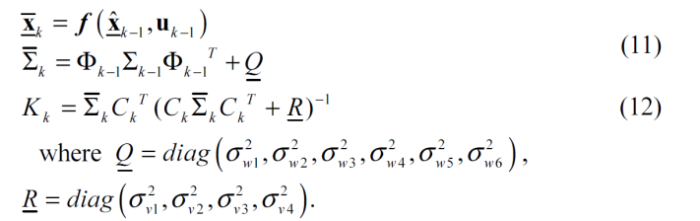
公式(11)用来计算状态向量和误差协方差矩阵,公式(12)用来计算卡尔曼滤波器增益。
符号-和^分别代表预测值和估计值。Φk和Ck的雅可比矩阵可由公式(13)得到。
根据EKF公式,可以更新估计状态向量和误差协方差矩阵。
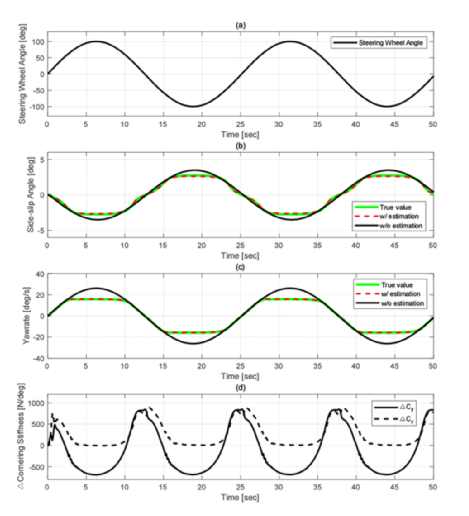
通过仿真来验证轮胎参数估计器的性能。仿真可以通过CarSim 和MATLAB /Simulink联合仿真来实现,车辆运动参数的真值可以通过CarSim来获得。当车辆以100km/h的速度行驶,输入正弦波的转向信号,比较有无估计转向刚度下的操纵变量。如图5所示,在估计前后轮转向刚度的情况下,通过计算得到的横向状态(如侧偏角和横摆角速度)和实际值贴合的很好。
(a)方向盘转角 (b)侧偏角 (c)横摆角速度 (d)转向刚度偏差
从转向操纵性、转向执行器的能力和安全避障区域的角度考虑,可以得到转向控制的输入。在通过MPC设计控制器时,公式(8)中的横向动力学模型作为预测模型,并根据跟踪误差和输入大小建立成本函数。
成本函数定义如公式(15)所示。并在选择转向控制输入时最小。
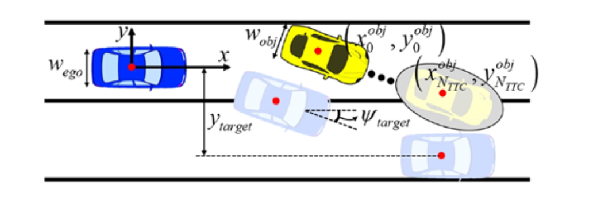
式中,yref 和∆u分别表示目标输出和控制输入率。目标输出包含期望横向距离,和期望航向角。由图6所示,如果自车的直线运动会发生碰撞,则输出变道以避免碰撞。用TTC来表示避免自车与周围车辆碰撞的时间边界,并且计算出可能发生碰撞的时间步长。
式中,d表示自车与周围车辆的相对距离,NTTC表示可能发生碰撞的步长。
然后,确定目标横向距离以跟随目标横向路径,并且在每一个控制步长都更新该值。
式中,yobjNTTC表示周围车辆在NTTC步之后的预测位置。wego和wobj分别表示自车和周车的宽度。+-号表示向左和向右避免碰撞,ymargin表示避障操作的偏差。此外,为了在避障过程中跟随车道,在每一步都更新Ψtarget。如图6所示。
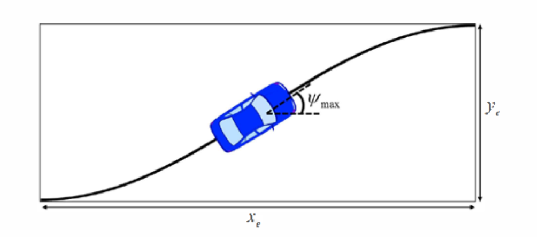
MPC其中一个优点是:在考虑诸如边界、输入大小等约束的前提下,可以确定最优输入。在本研究中,考虑了安全避障区域和执行器的能力这两个约束。为了定义安全避障区域,需要诸如自车航向角的将来的状态。但是,将来的状态可以在定义的约束条件下进行优化来获得。假设在紧急变道过程中,车辆遵循图7所示的正弦轨迹。
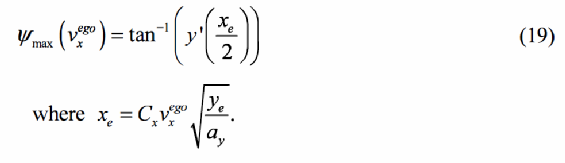
最大航向角可以表示为公式(9),并且它的值取决于横向加速度和横向速度。
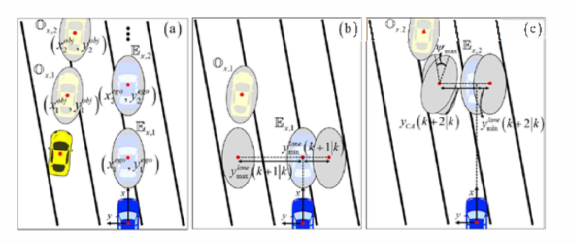
MPC控制器的避障路径应该包含在安全区域内,该区域表示为沿预测路径的横向距离范围。在考虑周围车辆的轨迹和道路边界的前提下,安全避障区域尺寸的最大值最小值在每一个控制步都被预测出来。
式中,ymin(k+i|k)和ymax(k+i|k)分别表示对于前方i步预测的最大和最小横向距离。
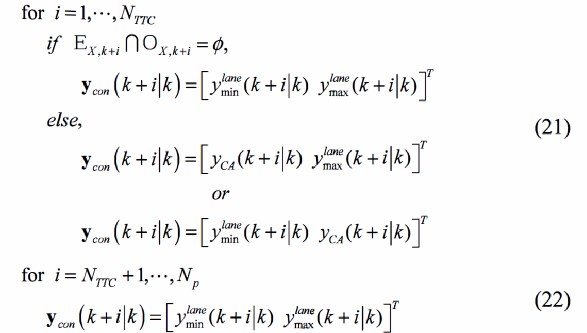
横向距离的极限作为约束条件,由公式(21)和公式(22)表示。如图8(b)和8(c)所示,除非自车和周围车辆的预测椭圆存在重叠,在避免碰撞的过程中允许车辆横向运动至左车道或者是右车道。如果他们的x坐标值相同,则将本车的椭圆进行横移和旋转以车道保持或者以最大航向角进行避障。
式中,yminlane(k+i|k) ,ymaxlane(k+i|k), yCA(k+i|k)分别表示预测第i步,到右车道、左车道和避障边界的横向距离。Ex,k+i 和 Qx,k+i 分别代表预测第i步的主车椭圆和周车椭圆的局部x坐标集。
对于MPC来说,应该考虑转向系统执行器的容量,因此将转向角和转向角速度的物理极限设置为转向系统的约束。
式中,umin和umax分别为转向角的最小值和最大值,∆umin和∆umax分别为转向角速度的最小值和最大值。
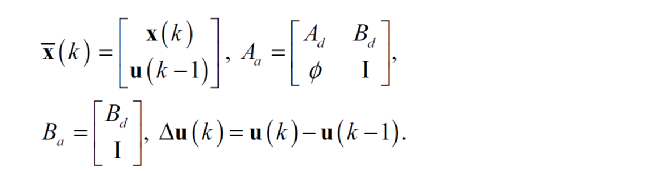
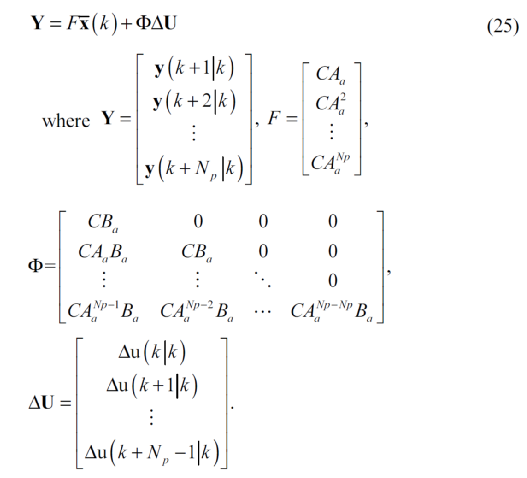
为了将公式(15)中的优化问题转化为一个有约束的标准二次型问题,公式中的预测模型转化成了增量输入输出模型。
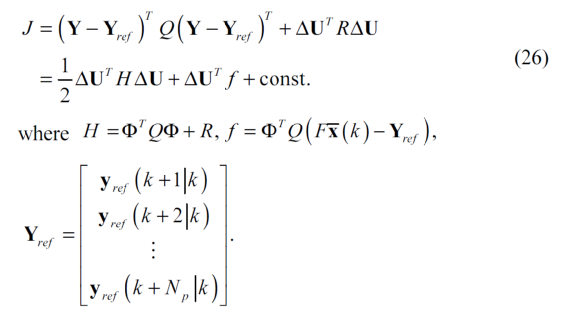
通过公式(25)和矩阵运算,公式(15)的成本函数可以表示成以下形式。
对于一个有约束的标准二次型问题来说,可以将3.2节中的约束表示为以下形式。
当将要发生碰撞并且驾驶员没有做出任何响应时,首先通过制动尝试避免或者减轻碰撞。在AEB中,假定自车的纵向减速度是恒定的,可以用TTC来作为AEB触发时间。
式中,TTCAEB是触发AEB系统的TTC,ax,AEB是AEB起作用时的制动减速度。由于车辆的减速度时有限的,所以通过制动来避障的最后那个时刻可以用式(29)中的TTC来表示。
式中,TTCbrake是AEB触发的最小TTC。ax,brake表示车辆制动时的最大制动减速度,满足|ax,brake|>|ax,AEB| , 因此,TTCbrake<ttc< span="">AEB。因为驾驶员可以施加最大制动减速度以避免碰撞,所以主动转向控制需要等待这一时刻。除此之外,只有在转向不会导致自车与周车及路边障碍物碰撞的前提下才能触发AES系统。
AES系统不仅要包括通过转向实现避障,而且要在避障之后实现回正,保证车辆稳定行驶在车道中。假定车辆在避障过程中的横向加速度是恒定的,通过AES避障的最后时刻可以用公式(30)中的TTC来表示。
式中,TTCsteer是触发AES的最小TTC,aymax是AES系统执行时的最大横向加速度,ytarget是换道时的目标横向位置。公式(30)中的最小值是左侧到障碍物和右侧到障碍物两者之间较小的TTC。根据公式(29)和(30),AES的接入时间可以定义在以下集合。
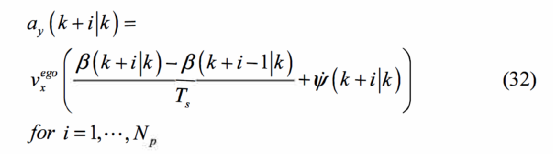
此外,AES系统仅在需要时介入。只有当驾驶员无法通过转向完成避障时,AES系统才会介入。在本研究中,当避障路径的预期横向加速度大于驾驶员通过转向可以避障的阈值时,AES系统才会触发。根据第3节中设计的最佳路径,横向加速度可以由下面的公式进行计算。
根据公式(32),可以确定每一步在整个避障轨迹中的最大横向加速度。
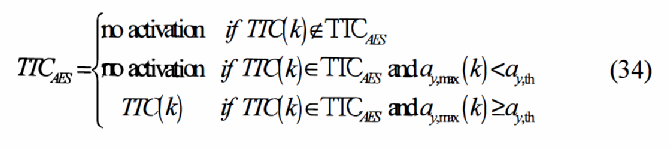
根据公式(31)和(33),AES系统的触发时间可以通过下面的规则来确定。
式中,TTC(k)是在当前时间计算的碰撞时间,ay,th是横向加速度的阈值。
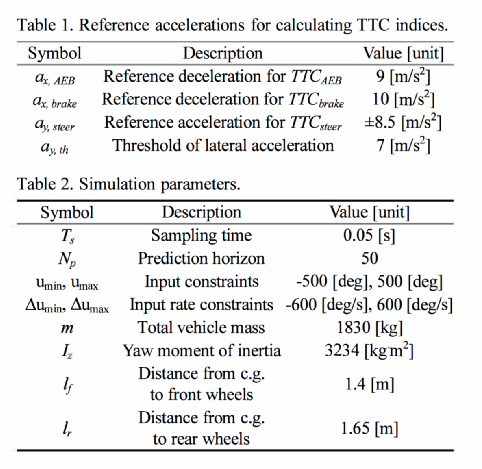
为了验证所提出的避障系统的有效性,考虑了以下两个仿真场景:避免与同车道的慢速车辆碰撞;避免与切入到自车前的车辆碰撞。表1给出了避免紧急碰撞时的加速度参考值,其大小可以根据系统干预程度进行调整。表2给出了车辆和MPC的相关参数。
在这种场景下,自车以不同的相对速度和重叠率接近前方同一车道的车辆。重叠率表示碰撞期间自车宽度与障碍物接触的百分比。潜在的追尾碰撞通过触发AEB系统来避免。触发AEB系统0.1s后,车辆以1.8m/s2减速,各种情况下的TTC在表3中列出。值得强调的是,制动始终作为首选,只有自车达到了TTCbrake这一临界点,AES系统才会被触发。
表3中第一组显示,在TTCbrake之前触发AEB系统,因为TTCbrake比TTCsteer小,所以触发AES系统时已经太晚了。因此自车保持最大制动以减轻不可避免碰撞中的损坏。
表3中第二组表明,在TTCbrake时刻无法通过制动来避免碰撞,但仍然可以通过转向来避障,因为AES的触发条件仍然可以得到满足。即使在两种速度同为80km/h的情况下的TTCsteer的值非常接近,AES系统的触发时间也有所不同,因为较小的重叠率的情况下,AES需要较少的时间来避免碰撞。
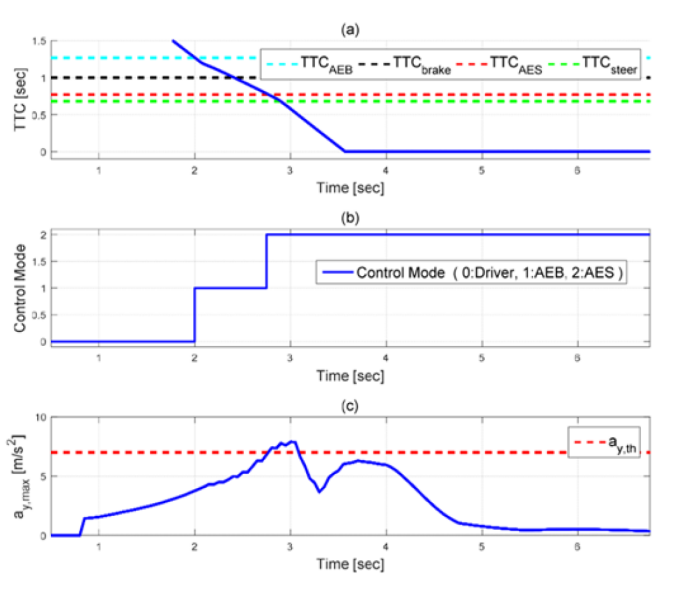
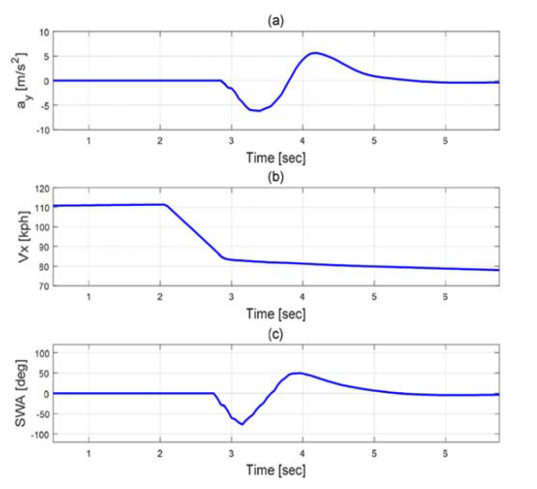
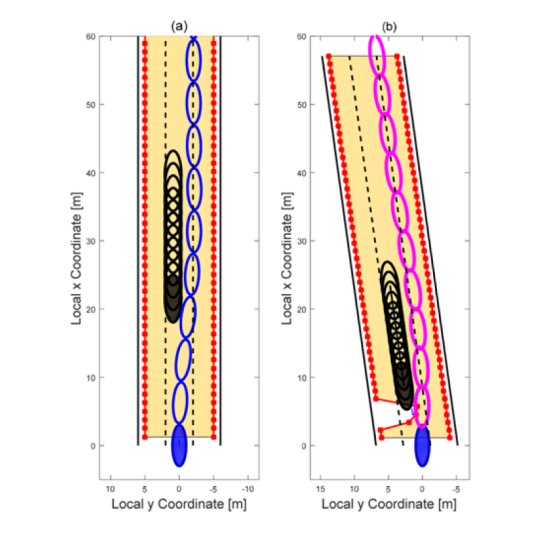
对于80km/h和50%的重叠率的情况下,图9说明了如何根据TTC值和预测的最大横向加速度来激活AEB和AES系统。AEB系统首先在TTC为1.27s时被触发,随后达到最迟刹车点。幸运的是,在TTC为0.78s时可以通过激活AES系统来避免碰撞。在避免碰撞的操纵过程中,车辆状态参数如横向加速度、速度和转向角随时间的变化如图(10)所示。前车和自车在TTCAES时的预测路径如图11a所示。自车实际的避障路径和预测轨迹由图11b所示。在图11中,由黑色和蓝色填充的椭圆分别表示前车和自车的当前位置。图11中的空椭圆对应着每0.25s的预测位置。红色虚线表示安全避障区域的边界,并且自车的避障轨迹应位于该区域内。
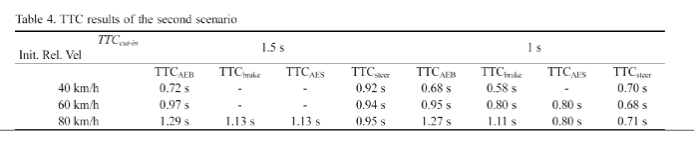
在此场景下,位于左侧车道的慢车突然切入到自车的前方。表4列出了不同相对车速,不同切入距离情况下的TTC的值。TTCcut-in代表切入车辆的初始TTC值,对应切入距离。再次强调,始终将制动当作首要选择,只有当自车过了TTCbrake点时,才可以触发AES系统。
通过表4中的第一组数据可知,AEB首先被触发,因为自车和切入车辆的预测轨迹预计会发生重叠。由于自车与切入车辆的距离比较远,所以只需要制动就可以避免与切入车辆碰撞。
表4中的第2组数据显示,AEB在小TTC时才会触发,因为自车和切入车辆的预测轨迹不存在交集。但是,当在左侧的附近车辆突然切入到自车车道时,自车会立即达到TTCAEB和TTCbrake,此时通过制动或转向来避障已经来不及了,因此,通过施加完全制动以减少损坏。表4中的第三组与第二组情况相似,由于自车和切入车辆的预测轨迹不会预计不会发生碰撞,所以没有触发AEB系统。当左侧车辆突然切入到自车车道时,在TTCbrake通过制动来避障已经不可能了,但是通过转向还是可以实现避障的,因为AES的触发条件可以的到满足。第三组数据成功的证明了当通过制动无法避免碰撞时可以通过转向来实现避障。
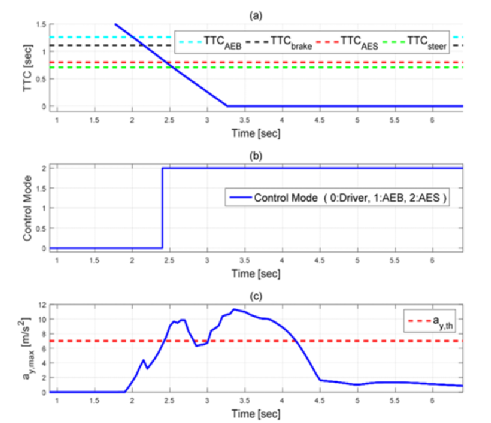
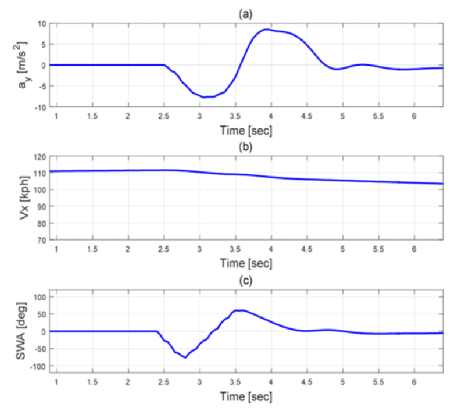
对于相对速度为80km/h、初始TTCcut-in为1s的情况,AES触发时,不同TTC值和预测的最大横向加速度随时间的变化曲线如图12所示。即使自车达到了TTCAEB和TTCbrake,AEB系统也不会被触发,因为自车和切入车辆的预测轨迹之间不存在碰撞。当切入车辆切到自车车道,且TTCAEB,TTCbrake已经过了,仍然可以通过转向来避免碰撞。如图13所示,当AES工作时,不仅没有发生碰撞,而且还实现了车道保持的功能。
在Intel core i7-9700K 3.60Ghz,16GB 的服务器上使用MATLAB R2019a,该整个算法迭代的平均时间为0.0025s。因此该控制算法可以达到实时性的要求。
本文中,当AEB系统无法实现避障时,使用AES系统来实现避障。利用周围车辆和自车的运动轨迹来判断碰撞,并根据路面形状来确定安全避障区域。为了改善自车轨迹的准确性,轮胎的非线性转向刚度在预测模型中不断被更新。根据带有安全避障区域和执行器容量约束的成本函数,应用MPC框架以获得最佳转向输入。根据AEB和AES系统的时间临界值,设计AEB和AES的介入规则,从而避免两个发证冲突,确保只有在必要的时候AES才会介入。尤其对于触发AES系统来说,不仅考虑了TTC值,而且考虑了最大侧向加速度,因为AES功能不仅要保证避开障碍物,而且要保证车道稳定。为了验证AES系统的有效性,在不同碰撞场景下对AES系统进行了仿真和比较。仿真结果表明,极限境况下,例如突然切入的车辆,AEB和AES系统都没有办法避免碰撞。但是,存在几种AEB无法实现避障而AES可以实现避障的情况。可以证明,将AES和AEB集成的算法可以改善避障性能。
《EMERGENCY COLLISION AVOIDANCE BY STEERING IN CRITICAL SITUATIONS》
文章来源:
2020 International Journal of Automotive Technology
作者:
Janghee Park, Dongchan Kim and Kunsoo Huh
https://link.springer.com/content/pdf/10.1007/s12239-021-0018-2.pdf


































获取更多评论