改进机械手与设备逻辑关系提高曲轴生产线效率
机械手作为近代自动控制领域中的一项新技术,已成为现代机械制造生产系统中的一个重要组成部分。机械手的迅速发展源于它的积极作用日益为人们所认识:首先,它能部分地代替人工操作,大大改善工人的劳动条件;其次,它能按照生产工艺要求,遵循一定的程序、时间和位置来完成工件的传输和装配,显著地提高劳动生产率,加快实现工业生产机械化和自动化的步伐。为了满足曲轴加工线的大批量生产,并实现在规定生产节拍内,准确地完成设备机床的上下料,我公司引进了德国某公司生产的上下料输送装置机械手。通过对此上下料机械手系统的验收,并结合其在正式生产运行的PMC统计数据,我们从理论上对机械手与设备上、下料之间的逻辑关系进行分析,并做了大量相关试验,下面就机械手的逻辑应用以及出现的问题进行讨论。
机械手逻辑现状及存在的问题
我公司运用机械手对OP70多砂轮磨床和OP80双砂轮磨床进行上下料,在OP70与OP80之间用Buffer 2来进行缓冲,以缓冲可能由于OP70磨床磨削主轴颈过快及OP80磨削连杆颈过慢导致的过多曲轴,其布局如图1所示。采用机械手进行上下料,原本可以大大提高生产效率,进而满足最初设计的生产纲领需求。在不考虑其他任何停机因素的情况下,该工位每个班(7.5h)理论可完成562件。
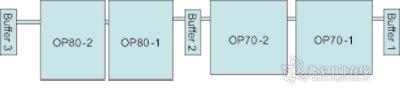
图1 OP70、OP80磨床与Buffer布局
然而,我们在正式投产后发现,机械手并没有达到最初的设计要求。现在OP70的单台加工循环时间为68s,机械手上料时间为12s,合计80s;工位合计循环时间为40s;该工位每加工10件零件需要花80s来对砂轮进行一次修整,图2为机械手的逻辑时间。在实际运行时发现,机械手在机床和缓冲Buffer 2上出现了一些问题:当OP70磨床当中有一台机床需要修整一次砂轮,线上的Buffer 2中有零件,Buffer 2上面的shift unit上没有零件,本来机械手应该从Buffer 2缓冲区上取料到shift unit上,以满足下道工序OP80机床的加工。但是机械手并没有进行这步动作,而是回到OP70机床前面的shift unit去取料,并停留在OP70机床上方等待机床修整完砂轮,给机床送完料后,再到Buffer 2缓冲区当中取料给Buffer 2上的shift unit,然后OP80上的机械手从shift unit上拿料到OP80磨床加工,这样会造成后工序缺了一件料,影响生产线速。按照每天3班,251个工作日来算,一个班会少生产56件,每年至少减少生产56×3×251=42 168根曲轴。机械手在机床上方的等待问题会对我们的产能造成很大的损失。
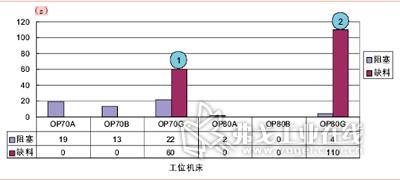
图2 改善前机械手逻辑时间
问题分析
针对机械手在OP70上面等待而不去执行清空Buffer 2操作的问题,我们对机械手的逻辑关系进行了比较细致的分析和对比。驱使机械手产生动作的信号从哪里来?有多少个这样的信号?这些信号遵循怎样的逻辑关系?通过对机械手控制程序的分析和研究,我们发现发给机械手的信号有三种:A——机床完成加工或提出零件加工需求的上下料信号;B——从抽屉里上料给机床,需要机械手过来抓取的信号;C——Buffer提出清空Buffer缓冲区的要求信号。
根据以上三种发给机械手的信号源的逻辑顺序(见图3),我们发现机械手的这三种信号存在一定的优先级顺序:A类信号优先、B类信号其次、C类信号最后才满足。当三种信号同时出现时,即机床上下料的需求信号、抽屉上料的信号和清空Buffer同时出现时,机械手优先执行机床上下料的需求信号和抽屉上料信号的命令。因此,机械手在自动情况下需要清空缓冲区Buffer的条件有以下几点:
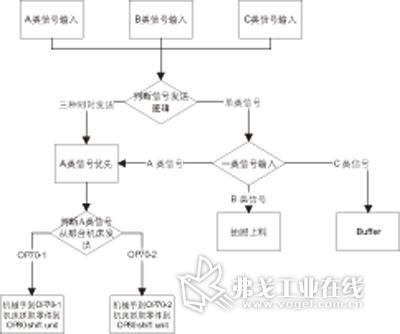
图3 三种发给机械手的信号源的逻辑顺序
1. Buffer有料;
2. shift out无料且在接料位置;
3. 用于送料的Z2机械爪手必须是空手;
4. 在以上条件都满足的情况下,机械手还需要一条额外的条件,即在20s内没有A类信号和B类信号的出现,机械手才能到Buffer里面取料给OP80加工。
此外,我们对机械手和机床的信号传输也进行了分析,发现有另外一种情况也会造成机械手没有去执行C类信号的操作,就是OP70磨床在快要磨削完曲轴的时候,机床会提前44s给机械手发信号,要求其给机床上下料,这样在OP70单台工作的情况下机械手只有24s的空余时间。这也是造成机械手不能曲轴清空Buffer的一个原因。
综合以上对机械手与机床的原理分析,当该工序只有1台机床加工时,机械手要花44s等待机床加工完成,之后还要再花18s给机床换料,并把合格零件送到下工序,机械手总保持着62s的执行命令状态,而只有6s来执行清空Buffer命令。可见,OP70机床修砂轮时,机械手无法执行清空Buffer功能。造成此现象的主要原因有两个:
1. 机床发给机械手执行上下料的信号太早,占用了机械手的工作时间;
2. 满足清空Buffer条件20s才启动清空程序的时间太长。
改造思路及建议
以上问题反映出机械手逻辑上的不合理,我们对影响机械手清空Buffer的两点主要原因提出了改进思路和解决措施:
1. 针对机床发给机械手执行上下料的信号太早的问题,我们认为OP70发出A类信号给机械手的时间安排不合理。OP70机床提前44s给机械手信号,造成机械手在OP70机床上方等待上料,等待时间最长达到51s,这段时间机械手本来可以完成C类信号的命令。我们调整了机械手的执行时间,更改机械手逻辑,接收到机床发出的上下料需求信号后延时26s后才执行。
2. 针对满足清空Buffer条件20s才启动清空程序的时间太长的问题,我们对机械手的逻辑时间进行了调整。机械手在没有接收到OP70发出的A类信号以及抽屉给它的B类信号时,需要等待20s之后再去执行C类信号。这样会造成即使Buffer有料,机械手也不会去执行清空Buffer缓冲的程序。因此,我们把清空Buffer的条件时间由原来的20s改为5s。
改进后的验证
我们对上述所做的更改进行了工位实际加工验证:只用1台机床进行加工,另外1台不加工以模仿机床的修砂轮,Buffer上有曲轴零件,当机械手送完料到OP70机床,机械手会在5s后到Buffer上取零件给后续的OP80机床进行加工。当两台同时加工时,机械手不会去清空Buffer。经过1周的生产观察,生产运行效果改善明显,生产效率大大提高(见图4),图5为我公司发动机工厂生产现场。
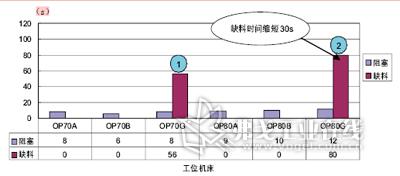
图4 改善后的机械手逻辑时间

图5 发动机工厂生产现场
结论
机械手虽然能代替人工操作,大大改善工人的劳动条件,将操作工人从繁重、单调的工作环境中解放出来,提高劳动生产效率。但是相对人的思维逻辑,如果机械手的逻辑时间设计不合理,也会造成生产延误与浪费。要找到最优的生产时间,需要经过生产实践的验证和摸索,对生产中影响到生产效率的几个瓶颈工位进行分析,并制定可行性方案,从而实现曲轴线生产的产能最大化。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖