ROBCAD仿真技术在汽车白车身中的应用
ROBCAD数字化工厂应用软件能够对整个制造过程进行设计、模拟仿真和管理,能够实现工位布局、机器人焊接、干涉检查、生产线、机器人滚边和人机工程等仿真。本文以焊接工艺仿真为例,介绍了ROBCAD软件的主要应用功能,分享了该软件在焊装领域的应用。
随着汽车生产线自动化水平的不断提升,工厂机器人的使用数量逐渐增多,传统的二维设计和3D设计软件(如CATIA、NX等)中的模拟已不能满足工艺规划的需要,为满足目前工艺规划的不足,专门针对数字化仿真设计的软件ROBCAD应运而生。
ROBCAD数字化工厂应用软件为我们提供了一个制造工艺平台,使企业能够对整个制造过程进行设计、模拟仿真和管理,能够实现工位布局、机器人焊接、干涉检查、生产线、机器人滚边和人机工程等仿真。使用数字化仿真能够对工艺方案设计进行仿真设计,以确定工艺方案的合理性,提高工艺规划的能力及缩短车身开发周期,提高生产制造能力、缩短生产线设计规划的时间,减少投资成本。
工艺方案建模设计
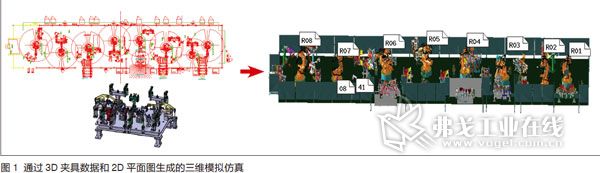
工艺方案仿真设计以3D夹具数据为基础,ROBCAD软件可以按照2D平面图精确的布置生产设施,并实现在三维环境下直观的进行生产仿真以及工艺验证,同时对生产资源进行方便的管理和编排,从而减少布局规划的工作量,减少布局→工艺→工装之间不必要的重复工作,提早发现布局中的错误,优化布局,缩短设备安装时间,降低投资成本。通过3D夹具数据和2D平面图生成的三维模拟仿真如图1所示。
通过3D仿真和生产验证,使我们能够及时发现空间静态干涉及动态干涉情况,为保证生产节拍,提升工作效率,提供有力的保障。仿真设计贯穿从概念设计到详细工程整个过程,它能够改进、获取和重复利用工艺规划,工艺设计团队能够比较不同方案,选择出最好的制造策略。
ROBCAD设计数据导入支持的格式为.co格式,该软件还提供了多种数据转化接口,包括stl、igs、cgr和wrl等格式,可通过CATIA、NX数据进行转化,提高了与其他软件之间的数据通信。
焊接工艺仿真
1.模型定义
模型定义主要针对夹具动作、焊钳焊接动作等设备进行工作定义,软件中通过link命令将焊钳或夹具定义为几个单独的部分,再通过joint命令定义夹具或焊钳的旋转轴或移动基准对设备的几个部分进行关节定义,最后对焊钳的状态进行定义,一般焊钳分为打开状态、焊钳关闭状态和焊钳半打开状态;夹具仅存在打开状态和关闭状态,不存在中间状态。定义完成的焊钳或夹具在仿真过程中可根据夹具或焊钳状态进行动作。
2.点焊模块
常见的焊装工艺有点焊、二保焊以及螺柱焊等,焊接形式分为移动式和固定式,移动式为焊接设备动作,车身件固定;固定式为车身件动作,焊接设备固定。
通过点焊模块可以对整车焊点进行优化和分配,可以处理整个点焊设计过程,考虑了一些关键因素,如空间限制、几何限制和焊接周期时间。通过功能强大的特征,用户能够创建虚拟单元和仿真,准确地反应物理单元和机器人行为。利用点焊模块能够进行节拍分析和优化,缩短了调试生产周期,通过功能强大的特征(如焊钳搜索、自动化机器人放置、路径周期时间优化器和焊点管理工具),并优化了新产品或者改良产品的推出,不需要必须停止焊装线从而造成生产时间上的浪费。
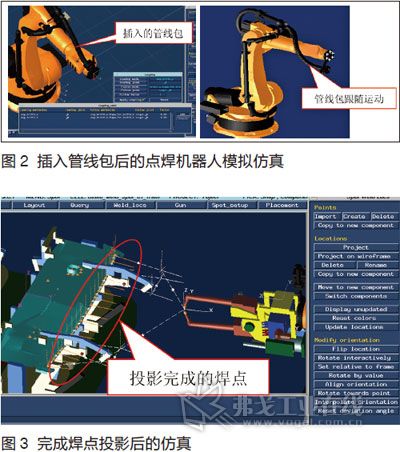
在ROBCAD软件中点焊机器人可对机器人管线包进行安装,并能实现管线包与机器人的4、5、6轴跟随运动,使机器人在焊接仿真过程中更能贴近现场,避免了机器人焊接过程中管线包与工装夹具及其他附属设备的干涉,从仿真设计阶段进行了充分模拟验证,插入管线包的模拟仿真如图2所示。
点焊模块主要针对机器人点焊进行设计,车身钣金数模上的焊点数据可由坐标值导入,焊点导入前需要将工作坐标系定义到工件上,这样才能保证导入的焊点坐标正确。焊点数据格式识别为后缀名为.pt格式的文件,可以使用文本文件打开,焊点定义格式为POINT&空格&焊点名称&X坐标值&Y坐标值&Z坐标值。
3.焊点投影的创建
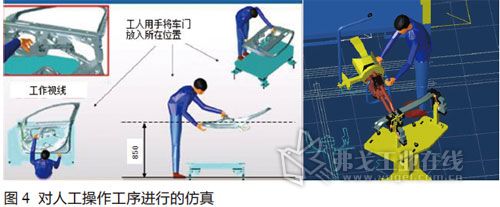
焊点导入完成后,由于焊点无坐标方向,需对焊点的坐标方向进行定义,焊点坐标的方向定义一般是焊钳进入的方向为X,焊接的方向为Z,焊点仿真的定义为焊接设备的坐标系与工件焊点的坐标重合,投影完成的焊点如图3所示。
点焊模块可实现真实仿真,模拟时间的计算,可以定义焊接焊点的加压时间、保持时间和接触时间等焊接参数及机器人动作的速度、等待干涉区等的设定,使焊接模拟过程更接近真实焊接环境。
点焊仿真模拟可以实现焊钳的选型及夹具的更改,根据仿真过程中产生的干涉验证情况,对焊钳或夹具设计进行变更,以满足工艺要求。通过点焊工艺仿真对焊点的工艺分配进行了充分验证,保证了焊接的可达性验证,也合理规划了焊点的工序分布。
4.操作流程模拟
ROBCAD可实现操作流程的可视化模拟,根据工艺规划对焊接工艺流程进行合理排布,包括物流运输、设备的动作顺序和设备运行之间的关系等,并将排布完成的工艺流程进行工序时间规划,最终形成焊接时序图。此模拟可实现规划布局的连贯性作业动作,更能直观地判断其中存在的逻辑关系的准确性。
5.人工操作工序仿真
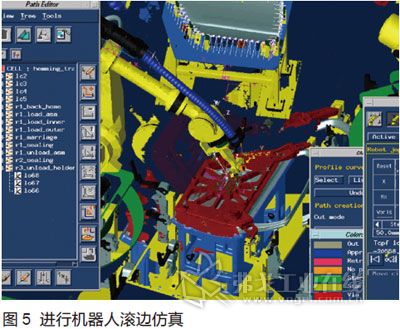
人机工程可对人工操作工序进行仿真,包括人工焊钳操作时人员的动作姿势、工取助力臂的动作等,通过对人员姿势的调整,可模拟人工操作的可行性及与夹具、周边设备的干涉性检查,并提出解决方案,人工操作工序的仿真如图4所示。
6.机器人滚边仿真
ROBCAD可实现机器人滚边仿真技术,机器人滚边工艺是由机器人按预定的程序和轨迹控制滚边工具的运动(见图5),将部件按相应程序进行折边处理,机器人滚轮翻边压合是通过装在机器人上的滚轮,对凸边进行多次滚压从而完成折边压合的一种方法。机器人滚轮翻边压合有不可替代的优越性,通过安装在机器人头上的压合工具,直接进入社保完成压合,灵活性高,一般分3次压合完成压合过程,压合预留量为0~0.1mm,而且利用机器人的六自由度和ROBCAD编程可以实现对所有的零件进行压合。
7.离线编程数据的输出
ROBCAD可实现离线编程数据的输出,ROBCAD软件离线数据与机器人建立了完美的数据接口,通过将仿真完成的数据导入机器人,可实现机器人按仿真数据进行动作,节省了手动示教调试机器人轨迹的时间,缩短了调试周期。
结语
上述为ROBCAD软件的主要应用功能,目前ROBCAD软件在汽车行业有着广泛的应用前景,随着软件使用范围的逐步扩大,软件的应用更趋向于专业化的发展,我们希望通过不断的使用和经验分享,使软件应用更完善,使其在焊装领域发挥更大的作用。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖