KOKUSAI动平衡机维修方法探究与实践
动平衡机是汽车制造领域最重要的装备之一,已广泛应用于曲轴、连杆、飞轮、制动盘以及齿轮、轮胎等旋转类零部件的动平衡检测与加工中。由于旋转类零部件的不平衡量往往直接影响到发动机或整车的性能与安全,为此作为检测与加工不平衡量的动平衡机本身就显得至关重要。我公司选用的动平衡机主要来自欧洲和日本,曲轴类动平衡机主要采用柯马和SCHENCK等品牌,盘类动平衡机主要采用日本KOKUSAI品牌。
本文以日本KOKUSAI盘类动平衡机为例,阐述了动平衡机的结构与工作原理,并结合实例介绍了常见的故障与维修方法。
动平衡原理与动压力的危害
机械中绕轴线旋转的零部件称为机器的转子。如果一个转子的质量分布均匀,且制造和安装都合格,则运转是平衡的。理想情况下,其对轴承的压力,除重力之外没有其他的力,即与转子不旋转时一样,只有静压力。这种旋转与不旋转时对轴承都只有静压力的转子,称为平衡的转子。如果转子在旋转时对轴承除有静压力外还附加有动压力,则称之为不平衡的转子。
从牛顿运动定律可知,任何物体在匀速旋转时,旋转体内各个质点都将产生离心惯性力,简称离心力。图1所示为盘状转子,转子是以角速度ω作匀速转动,则转子体内任一质点都将产生离心力F,则离心力F=mrω2, 这无数个离心力组成一个惯性力系作用在轴承上,形成转子对轴承的动压力,其大小则决定于转子质量的分布情况。如果转子的质量对转轴呈对称分布,则动压力为零,即各质量的离心力互相平衡,否则将产生动压力,尤其在高速旋转时动压力是很大的。

图1 动压力原理
动压力的存在不只是对轴承造成额外的冲击、缩短轴承的使用寿命,更重要的是,它会破坏整个力系统的动态平衡,使系统产生震荡、摆动甚至破会系统的机械结构。对汽车发动机来讲,动不平衡将直接影响发动机性能,使发动机产生异常噪声,甚至根本无法正常工作。对整车而言,制动盘的不平衡和轮胎的不平衡将直接影响到整车的操控性和安全性。因此,对旋转体而言,特别是高速旋转体进行动平衡校正是非常必要的。
动平衡机的结构与工作原理
1.机械振动系统
动平衡机主要由机械振动系统、驱动系统和电气测量系统等三大功能单元组成。
机械振动系统主要功能是支承转子并允许转子在旋转时产生有规则的振动。振动的物理量经振动传感器检测后转换成电信号送入测量系统进行处理。
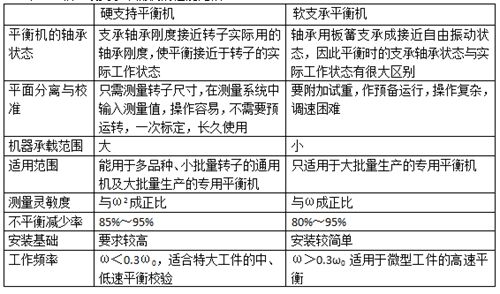
平衡机的种类很多,如果按机械振动系统的工作状态分类,目前所见的不外乎两大类:硬支承平衡机和软支承平衡机。硬支承平衡机是指平衡转速远低于参振系统共振频率的平衡机。而软支承平衡机则是平衡转速远大于参振系统共振频率的平衡机。简单来说,硬支承平衡机的机械振动系统刚度大,外力不能使其自由摆动。软支承平衡机的机械振动系统刚度小,一般来说,外力可以使其自由摆动。软、硬支承平衡机的性能比较如表1所示。
表1 软、硬支承平衡机的性能比较
2.驱动系统
驱动系统的主要功能是驱动转子,使转子在额定的平衡转速下旋转。目前常见的驱动系统主要是变频电动机带动万向联轴节驱动和皮带驱动。万向联轴节因本身结构中存在间隙以及在工件安装时存在几何偏差,这些误差将直接影响工件的平衡精度,这一点在加工特大工件和心轴安装时更为突出。因此,万向联轴节驱动主要用于普通的、平衡精度要求不是很高的卧式平衡机。
在皮带驱动中,由于皮带具有减振作用,能减少驱动电动机的振动对转子的影响,且转子不需要在平衡机上做准备,也不需要附加连接件如螺栓、插销等转换固定装置,因此安装迅速。与万向节驱动相比,它不存在结构间隙及安装几何偏差,能大大提高测量精度。
3.电气测量系统
电气测量系统的主要功能是处理由振动传感器产生的电信号,经过数据采集和滤波处理,计算并显示出转子不平衡量所处的位置和大小。它是平衡机中的关键部件,其好坏直接影响平衡机的精度和性能。
日本KOKUSA动平衡机的控制系统是该公司自主研发并不断改进的一套完整的工业计算机系统。
4.不平衡量的校正
不平衡量的校正过程,即是从转子上较重的部分去掉一部分材料,或者在转子较轻的部分加上一些平衡配重,使转子趋于平衡的过程。不平衡量的校正通常有加重和去重两种平衡校正方法。由于各种原因的影响,一些转子的平衡状态在使用过程中会发生变化,对这些转子通常就要采用加配重的方法进行校正。这样做的好处是便于转子(以及整机)的再行校正。在不平衡量较大时,去重校正显然不及加重校正方便快捷。用户可以根据工件的具体情况选择合理的平衡校正方式。
动平衡机常见故障与维修方法探究
1.动平衡机电气控制原理及常见故障分类
(1) 动平衡机电气控制原理
动平衡机与普通机床相比,其核心功能是通过对旋转零件产生的不平衡量进行数据检测、滤波、分析和计算,最后通过切削或钻孔的方式去掉不平衡量从而使零件达到动平衡。这一特殊功能的实现,主要由一台专用的工控机和一套专用的动平衡软件来进行控制。机床其他辅助动作,一般由另一套PLC来进行处理。
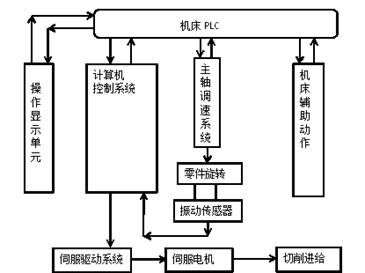
图2 动平衡机电气控制原理
图2所示为控制系统电气框图。其中,计算机控制系统是一台特殊的工控机,除了具有普通工控机的功能外,还包含了对零件不平衡量进行的数据检测、滤波、分析、计算以及对切削进给系统发出进给指令等。它也是动平衡机控制系统最核心的功能单元。
振动传感器是用于检测不平衡系统产生振动时的振动量和相位角,为计算机控制系统提供唯一有效的数据源,也是动平衡机最关键的部件之一。
主轴调速系统实现对主轴及零件转速的精确控制,根据需要变换零件转速;伺服系统用于对零件不平衡量切削的精确控制;PLC则对机床所有动作的逻辑关系进行管理和控制。
日本KOKUSAI动平衡机的部分功能部件如图3所示。
(2)动平衡机常见故障分类 PLC单元
动平衡机的故障大致可分为控制类故障和误差类故障两大类。控制类故障主要是电气和机械执行部件硬件方面的故障,如:计算机控制系统、操作显示单元、PLC、调速系统、伺服系统、伺服电动机和回转油缸,以及其他机械执行部件如摆架等硬件故障。其中,计算机控制系统方面的故障又包括计算机硬件故障和软件故障两个方面。误差类故障主要表现为动平衡系统的校准、测量和去重等误差较大或无法正常进行。
控制类故障的处理方法与普通数控机床类似,主要是对硬件进行诊断、更换或调整。而误差类故障由于没有报警,往往需要对过程进行跟踪分析,通过微调控制参数、工艺参数、机床静态特性等方法进行处理。本文重点介绍误差类故障的分析与处理方法。

图3 日本KOKUSAI动平衡机组图
2.动平衡机误差类故障的处理
动平衡机误差类故障主要包括校准类故障、测量类故障、切削控制类故障和动平衡系统切削曲线方面的故障等。
(1)校准类和检测类故障的分析与处理
所谓校准类故障是指机床在进行检测系统校准时出现的故障,主要表现为:机床无法按照厂家规定流程完成动平衡机检测系统的校准。出现校准类故障的概率并不高,一般问题出现在如下几个方面:
① 振动传感器方面的故障:故障原因主要为振动传感器松动、损坏或线路接触不良等。由于振动传感器是动平衡机振动量的直接检测元件,也是计算机处理系统的数据源,因此,其性能好坏和紧固状态将直接影响到动平衡机数据采集的准确性。
②校准件(或零件)夹紧方面的故障:由于工件未夹紧导致零件(标准件)旋转时发生摆动,产生额外的不平衡量,使机床不能有效进行校准或者在测量零件时明显出现误差。
③机床摆架松动使旋转机构自身不平衡导致校准无法进行:摆架松动导致自身不平衡不仅会引起测量误差,也会引起零件去重的误差,这一点往往容易被忽略。
④ 机床底座松动导致床身没有达到水平:由于床身没有达到水平,零件或标准件旋转时引起机床共振,干扰了振动传感器的数据采集,从而导致系统校准或测量时产生误差。
⑤ 零件旋转转速不当导致数据采集异常,这一点也是最容易被忽略的。零件或工件的转速不同,产生的振动量也不同。在进行系统校准时,要求测量件的转速在规定的范围内,否则,校准数据会有很大误差。同样,校准不准确,对加工零件不平衡量的计算也就会产生很大误差。
⑥标准件或配重砝码生锈导致校准出现偏差,这一点也是容易被忽略的。因此对校准和砝码的保管要引起重视。
(2)机床加工零件后进行检测,出现新的不平衡
这一类故障也是出现概率最高的故障。出现这类故障后首先要判别不平衡量是出现在同一方向还是相反的方向,现象不同处理方法也不同。产生这类故障的原因有以下几个方面:
①切削余量不足,未消除原有不平衡。这种情况不平衡量会出现在同一个方向,一般通过提高切削进给比例系数或重新校准可以得到快速解决。
②切削余量过大,导致相反方向出现不平衡。这种情况首先要对系统进行校准,其次通过降低切削进给比例系数来减少切削进给量。这种情况下出现的不平衡点的相位角一般是对称的,表明相位角检测没有问题。
③振动传感器故障导致测量误差偏大,见前文中的分析和处理方法。
④不平衡量相位计算异常导致新的不平衡产生,如果通过多次去重加工,新的不平衡点的相位角在不断变化,则可能是系统相位检测出现误差。检查或更换传感器,必要时微调系统的相位角参数。
⑤毛坯质点分布不均匀导致零件去重误差:个别毛坯质点分布不均匀,去重计算量不匹配,直接导致去重误差。
3.系统程序或校准曲线方面的故障
早期的动平衡机控制软件一般属于DOS版本。每一个去重量的计算是根据“切削曲线”来近似确定的。“切削曲线”是预先设定的5~10个不同的不平衡量对应不同的去重量而模拟产生的曲线。该曲线可以根据毛坯质点分布的变化进行调整。如果产品毛坯批量更换,毛坯质点发生较大变化,原来的“切削曲线”已不再适应,需要进行“切削曲线”的调校,否则会出现大批零件去重不合格。此外,当机床使用年限长久,主轴等旋转部件自身的不平衡量加大,无法进行校准时,对“切削曲线”进行调校也是必须的。
典型案例分析
1.案例一:XF2145动平衡机无法校准的分析处理
(1)故障现象:用标准件无法校准机床,加20g砝码后,不平衡量不能达到规定的数值(268+2)gcm。虽偶尔校准通过,但加工零件不稳定。
(2)原因分析:校准无法进行,零件加工不稳定,从以下4个方面入手分析:标准件检查、动平衡系统相关参数调整、相关硬件如振动传感器的检查以及机床安装基准检查。
(3)处理过程
①排除标准件方面的原因:可与XF2166(相同工序机床)的标准件调换进行测量,观察检测结果。此外可观察标准件是否有损伤现象。
②动平衡系统相关参数的调整:对照系统参数表,逐一核对测量和校准的相关参数,适当调整个别参数,观察现象有无变化,现象依旧。
③相关硬件的检查:主要检查振动传感器,包括其安装有无松动、断线,可参照测量零件时屏幕上的数值变化进行判断。同时检查编码器、旋转电动机和皮带有无异常。
④机床安装基准检查:在机床测量标准件时,用力推动机床相关部位,尤其是机床底部主轴连接部件,观察测量值有无明显变化,若在1~2gcm以内可视为正常,否则机械检查机床底座是否稳固和水平。
(4)处理结果:机床底座不稳,未达到水平,调整后机床故障完全恢复。
2.案例2:XF2145日本动平衡机切削曲线的调校
(1)故障现象:大批零件不平衡量切削后不合格,无法生产。
(2)分析与处理
大批零件去重后仍不平衡可能原因及处理方法:怀疑机床未校准,反复校准,故障依然存在;怀疑机床底座不稳,有振动,导致测量误差,重新打水平,紧固地脚螺钉,故障依然存在;怀疑机床进给部分丝杆有间隙,造成进给不稳,机械检查后未发现异常;更换振动传感器,故障依然存在,怀疑主轴存在自身不平衡,加平衡螺钉,仍有部分零件加工不合格;怀疑毛坯质点分布不均匀,更换毛坯后,原切削曲线不匹配,查资料并对机床切削曲线反复调校,最终排除故障。
(3)切削曲线的调校
进入动平衡原程序CUTTING.BDT可以看到:程序预先设置了有代表性的5个点(新动平衡机可以设置10个点),列出了不平衡量及对应的切削深度,系统由此对应关系建立数学模型,从而计算出不同平衡量对应的切削深度,控制伺服轴作相应的切削。因此,如果从程序中改变这5个点的对应关系,将直接改变切削曲线。切削曲线的变化如图4所示。
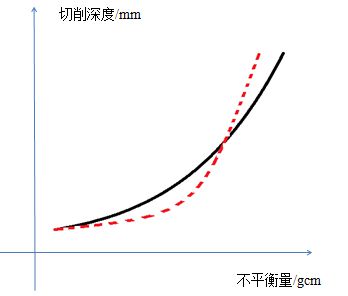
图4 切削曲线的变化
结语
动平衡机的校准和去重误差类故障是动平衡机中故障率最高的故障。引起故障的原因较多,可以根据具体情况对症下药。一般情况下,在设备安装调试完成后,“切削曲线数”基本确定,一般不再更改,但当机床使用年限长久,主轴自身平衡发生变化,刀具尺寸也有调整,引起去重误差时,常规处理方法显然已不奏效,因此需要对“切削曲线”进行调校。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖