驾驶功能与软件技术的紧密衔接
要想完成驾驶辅助功能的设计,首先要对车辆环境有足够多的了解,而采集车辆环境信息所需的是基于许多不同探测原理(例如视频摄像、雷达、激光和超声波等原理)、可对不同环境范围进行探测的传感器。同时,数据的采集和数据处理的冗余也是排除可能出现的故障、快速可靠地做出正确判断必不可少的。但遗憾的是,目前可供使用的驾驶辅助功能还不够完善,分属不同的控制域,例如停车辅助系统、远光灯辅助系统等。简单来说就是,在这些不同的专业领域之间只能进行有限的信息交换,有些功能使用相同的组件也是非常困难的。
必要的整合
“为了实现复杂的驾驶辅助功能,就必须对功能层次进行分类、整合,充分地利用好所有驾驶辅助程序之间的协同作用。”奥迪电子技术有限责任公司(以下简称“AEV公司”)软件开发中心领导人Florian Netter先生强调说道。据悉,AEV公司计划将来要实现把所有传感器采集到的车辆环境数据、信息交给传感器数据处理中心处理,而这一传感器数据处理中心还会辅助接收到Car-to-X车载智能化通信装置(由另一个中距离探测传感器接收)的信息以及后台(远距离)接收到的数据、信息。在这些数据、信息的基础上,就可以模拟计算出车辆周围环境的完整模型,也奠定了测算下一步行驶轨迹计划的基础,例如汽车将要向何处行驶、需要哪些行驶控制命令等。

驾驶辅助中央控制器ZFAS的重要组成部分是Mobileye(EyeQ3)和Nvidia(Tegra K1)计算芯片
奥迪公司打算利用这一数据处理中心把各个单独的驾驶辅助控制程序集成为一个综合性的自动驾驶控制功能。被奥迪人称之为“ZFAS”的驾驶辅助中央控制器,它是一种能够为自动驾驶处理所有传感器信息、数据的中央控制器,已经具有大批量生产的硬件构架了。ZFAS电子模块的数据处理能力满足了今天中档轿车的数据处理能力要求,每秒所能完成的浮点运算次数达到了750 GFlops。在2012年,能够具有这种运算能力的中央控制单元还是相当庞大的,足以填满整个后备箱;而今天,汽车自动驾驶的这一中央控制器只有一个笔记本电脑的大小了。据悉,ZFAS驾驶辅助中央控制器已经可以与大批量生产的新型奥迪A8配套使用。
关键要素
驾驶辅助功能的分类不仅仅对控制器硬件的设计有影响,而且也改变了车辆的整个电子、电气系统结构。因为未来巨大的数据量是分散式配置的、有着不同总线技术(例如,CAN总线、Flexray总线、MOST总线和LIN总线等)的驾驶辅助控制器以及不同总线系统之间网关所不能胜任的。Florian Netter先生认为,需要一个“中央控制系统”,它除了能够处理车辆行驶控制之外,还要更多地考虑到通信问题。这样,不仅仅是通过Car-to-X车载智能化通信向汽车传输信息,而且能通过外部的传感器、云技术和智能手机向车辆传递数据、信息。此外,类似ZFAS辅助驾驶中央控制器的高性能控制器能够把多个车辆子系统(控制域)的小型ECU的控制管理汇总到一起,例如模型构架可以把四个子系统(驱动管理、车架、多媒体和自动驾驶)都控制起来。
新的通信系统结构体系
各控制域之间密集的数据交换超过了网络拓扑的带宽。作为各个控制域与控制器之间新的主干网,奥迪公司采用了基于以太网通信协议的、带宽至1 GB/s的网络。但这并不是最终用户所熟悉的以太网,而是专门为汽车工业开发的升级版以太网变型。原则上讲,这是一种有着点对点连接的计权网络。作为这一网络的补充,利用CAN总线和LIN总线在子网系统中承担那些对相应时间和带宽要求不严格的数据传递任务,辅之以电缆和电气元器件连接的紧密配合电缆和整个电缆束在车辆中的装配,使得这一系统更加完美。因为满足一个个单独的专业技术规范还远远保证不了电缆束整体的技术规范要求。
标准化的接口技术
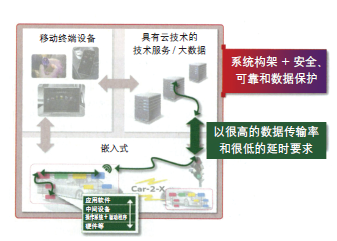
车辆内部的电气、电子结构的连接还没有形成与车辆外部的通信。与车辆外部的通信联系更多的是要依赖Car-to-X车载通信系统的性能、基于云技术的技术服务商、移动通信设备和数据传输标准、数据传输率和现代无线通信技术标准规定的延时要求等都必须在车辆的电气、电子系统设计中予以考虑。而且这不仅仅是一个现状中需要考虑的问题,而是在很高创新速度这一背景条件下必须考虑的问题。
另外,把功能安全、数据安全和各国家地区的数据保护规定都逐步地“融入”系统构架的设计之中也是必须要考虑的。“在通信链路的设计中,各个数据流从起点到终点的全面分析、优化的思路是非常有帮助的。”Florian Netter先生说道。
另一个重要的连接点就是,系统构架中定义的四个控制域之间接口。奥迪公司设计了集成有接口适配器的连接平台,这就保证了可以使用定义的和标准化的接口,也保证了与后续开发工作的无缝连接。同时,这一设计也提高了软件系统中软件包的重复利用率,降低了软件系统的开发费用。其中最重要的是管理程序,它能够让用户在控制器中通过虚拟化,例如通过使用标准的(例如Autosar汽车开放系统架构标准)以及不同的软件包。
还有一个组成部分就是奥迪公司自主研发的移动计算构架——Mobile Computing Framework。它包含安卓和苹果系统驱动程序库,是专门为移动终端设备的应用而开发的。
面向未来的测试环境
基于云的技术服务已经形成了一个软件框架,在这一框架的帮助下可以实时地进行数据分析和数据处理。在不久的将来,奥迪公司也打算在这里实现机器学习算法的应用,通过对过去发生的实例和类似情况的分析能够找出解决新问题的方法。
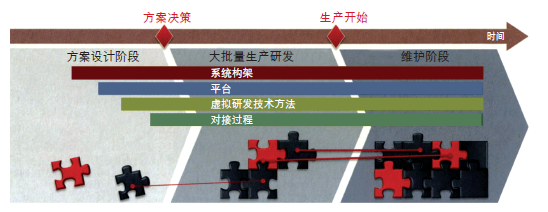
重要的是, 在方案设计阶段就开始使用研发设计技术方法
除了在平台技术和系统构架研发方面有着重要的作用和意义之外,虚拟的开发技术方法在汽车控制软件的开发中也有着举足轻重的作用。因此,AEV公司开发了被他们称之为“FEP”的功能性集成平台,这是一种可扩展的测试环境平台。“这一平台把所有的测试系统,直至移动终端设备和基于云技术的技术服务都虚拟化了,从而可以在早期就完成算法语言、软件构架和控制器以及硬件样件的验证和确认工作。” Florian Netter先生说道。
另外,FEP功能性集成平台还可以与真实的控制器和HiL硬件在环仿真试验台配套使用,从而也能够完成检验标准和车辆的测试。传感器模型的集成,例如雷达传感器与驾驶员模型的耦合,与交通情况的模拟等都使其有着很灵活的使用可能性。整体统一的系统构架、平台技术和虚拟分析技术等都是软件创新的前提条件,奥迪公司认为,这是加快汽车研发速度和可持续开发的关键。
为此,AEV公司还提供了一个能够组织连续性改进整体式模块化嵌入式软件开发项目的开发平台。这一平台包含了所有的工具、合适的开发设计方法、性能强大的基础平台以及为软件研发人员、工程师提供了技术支持服务。Florian Netter先生表示,这一项目通过了面向汽车行业的流程评估模型3级的认证评审,也可以根据每个具体项目的具体情况适时调整。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论