基于汽车发动机控制模块的耐久性测试系统
副标题#e#
1、引言
(PCM)是汽车的控制神经中枢,直接影响到汽车的动力性和燃油经济性和尾气排放。随着汽车电子工业的发展,PCM已经成为汽车的一个标准配置。由于PCM系统十分复杂,工作环境极为恶劣,其可靠性至关重要,因此,PCM是开发汽车发动机PCM的重要支撑条件。
上世纪80年代,几家国际上知名的PCM模块制造公司如博世、西门子、德尔福、伟世通,针对自己的产品相继进行了PCM耐久性测试技术的研究,并研制出了相应设备。由于这类设备仍然沿用的是20多年前的设计体系,已经不能适应日新月异的汽车电喷发动机技术的发展,整体技术平台落后,存在一些不可克服的缺陷,例如不能兼容不同厂商的PCM模块,不能设置自动循环策略,不能现场配置模拟信号类型和参数等。目前,我国自主开发的汽车电子产品正处于加速发展阶段,但是由于我国汽车工业起步较晚,自身技术落后,科研能力不强[1],现有的PCM技术来自国外,有关PCM的耐久性测试技术在国内还属于空白,只有少数的高校围绕汽车电喷发动机开展了故障诊断、信号测试、运行机仿真等方面的研究[2 -4],没有形成成套技术。
本文介绍了汽车PCM耐久性测试系统的整体设计思路和测试规范,重点讨论了关键子系统的设计原理,并通过原型样机对几种PCM模块长久性测试,验证了该系统的可靠性和通用性。
2、整体构思
2.1 PCM工作原理
汽车发动机控制模块(PCM)是汽车控制系统的核心部件,主要由输入电路、模拟信号、数字信号转换器、微机、输出回路等五个部分组成。其作用是接收各种传感器信号,经微机的运算、处理,向执行器发出指令,接通各执行器的接地线,使其通电而工作,以精确控制燃油供给量、点火提前角和怠速空气流量。
2.2 PCM耐久性测试系统的设计思路
本文以电喷发动机的控制技术为基础,采用多层CAN总线通信技术、虚拟仪器技术和嵌入式计算机系统,设计了一个通用开放的PCM耐久性测试系统。它主要由工业控制计算机(工控机)、信号发生子系统、模拟负载子系统、负载监测子系统、大功率程控电源、环境实验箱、现场总线通信子系统、应用软件和数据库管理系统等组成。其硬件系统与原型样机如图1、2所示。
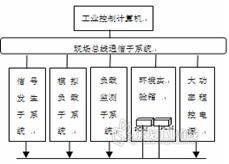
图1 PCM耐久性测试通用平台的硬件系统

图2 PCM的耐久性测试系统的原型样机
该测试系统的测试原理:以PCM为测试对象,由工控机根据测试类型和测试项目的不同发送设置指令,控制环境变量和大功率直流电源,快速切换汽车传感器信号和模拟负载连接,并及时向负载监测系统发送读取指令,在线监测PCM运行状态。
2.3 PCM耐久性测试规范
耐久性测试规范是PCM耐久性测试的依据,关系到PCM整体质量。为了提高PCM正常运行时的可靠性和耐久性,必须建立一套能够最大限度激发PCM失效的测试规范。本系统建立耐久性测试规范的原则:(1)充分考虑引起PCM 失效的多种应力参数;(2)保证足够的测试时间以验证PCM模块在预计的寿命内有足够的可靠性[5]。
根据PCM各种工况下的极限环境,确定了温度、湿度、电源电压等重要参数,建立了一套周期为6小时的测试规范,具体如图3所示,并通过了利用DSPACE快速开发平台和NI虚拟仪器平台建立的耐久性测试实验平台的检验。
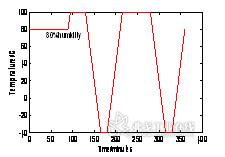
(a) 温度和湿度参数
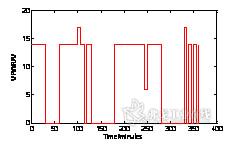
(b)电源参数
图3 相关参数的测试规范
3、PCM耐久性测试系统的主要构架
本系统采用研华工控机,通过安插调理放大器、A/D、D/A卡,安装Visual C++、LabVIEW等开发应用软件,构成一个虚拟仪器平台,实现了计算机的全数字化的采集测试分析。此外,系统选择了安捷伦6691A型大功率程控电源用于模拟蓄电池和发电机工作,设计了能容纳多个PCM的环境实验箱。
3.1 信号发生子系统
在相关文献中,信号发生装置均只针对特定的PCM而设计,灵活性较差。该子系统利用虚拟仪器技术,主要结构是一个以ARM单片机和CPLD为硬件框架的嵌入式计算机系统。它只要分配给各个信号发生模块不同的标识(ID),就可通过现场总线进行系统扩展,实现多模块的信号发生子系统网络。
采用DDS技术在当前的测试测量行业已是一种主流的做法[6],其频率精度可随相位累加器的位数而定。本系统采用单片机+专用DDS芯片的方式产生正弦信号,其原理如图4所示,ARM单片机向CPLD 发出控制命令,CPLD 在时钟下译码后产生DDS的控制信号,产生出相应频率的正弦波信号,该正弦信号经过滤波放大后,输出相应幅值的正弦信号。
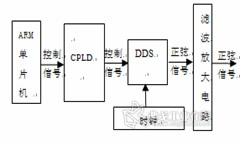
图4 正弦信号产生原理图
#p#副标题#e#
曲轴位置信号(CPS)是PCM控制点火系统中最主要的传感器信号,为适应多种PCM的需求,设计采用CPLD和DA的方式产生。CPS信号产生原理如图5所示,在EPROM中存有一个周期的正弦表数据,当需要产生CPS信号时,ARM单片机对CPLD进行设置,CPLD根据接收的控制命令,通过时钟计数,产生读存储器的信号,并向EPROM提供合适的地址信号和控制信号,EPROM输出相应地址的数据,经D/A转换,变成单端CPS模拟信号,然后经滤波电路和单端转差分处理电路,输出CPS差分信号。在实际的电路实现中,对CPS信号的控制可由计算机通过CAN总线向ARM发出控制命令进行设置,因此,即使ARM芯片在运行过程中复位,电路仍能输出正确的CPS信号,以确保测试周期的正常进行。
该子系统还针对各类PCM模块的需求,设计了两种VREF/2信号的产生方式:电阻分压方式和运算放大器分压;同时,利用555时基电路和滤波放大电路设计了PWM发生器;此外,该子系统还采用电阻分压加集成运放隔离的方式产生PCM需要的小幅值固定电压信号(比如1.0V)。
3.2 模拟负载子系统
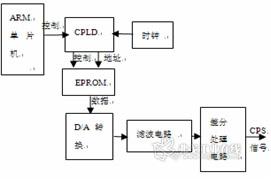
图5 CPS信号产生原理图
该子系统主要模拟PCM连接的点火线圈、喷油、碳罐电磁阀、废气再循环等输出负载。该子系统是一个能模拟各种PCM输出负载的开放式负载系统,并可通过现场总线进行系统扩展。
本文综合分析了PCM负载的公共性和特殊性,设计了两种类型的负载板:公共负载板和特殊负载板。模拟负载模块有多块模拟负载板组成,并同负载监测模块一起安插在负载箱里。当需要进行具体项目的测试时,可通过继电器矩阵完成负载的切换工作。此外,还采用了光电隔离方式将PCM输出信号转化为负载监测子系统能接收的+5V TTL信号。
3.3 负载监测子系统
该子系统也是一个基于ARM单片机和CPLD为主要硬件框架的嵌入式计算机系统,并可通过现场总线,进行系统扩展。该子系统通过实时读入模拟负载子系统中监测信号,监测PCM在过程中输出的所有负载信号的变化情况,包括信号的变化周期,部分重要信号输出的时序等,并将监测结果,通过现场总线上传到工控机。
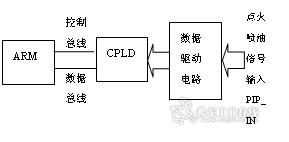
图6 点火、喷油信号监测原理
点火和喷油信号是中的关键信号,其周期和时序直接关系到汽车的运行状态,因此监测它们的周期和时序尤为重要。本系统监测原理图如图6 所示,对于点火信号的监测,主要是监测它与CPS信号的同步,以及两个或四个点火信号之间的时序关系。当CPLD寻找到点火信号与CPS同步的起始点后,根据输入的PIP_IN信号,对各点火信号进行计数。每当一个点火周期完成后,在下一个点火周期向ARM 单片机产生一个中断信号。该中断信号触发ARM 单片机进入中断处理程序,在该中断程序中,ARM单片机读入对各点火信号的计数值,判断点火信号的时序和周期,并设置点火信号正常与否的标志。对于喷油信号的监测,主要是监测它与CPS信号的同步,以及它们之间的时序关系。当PIP_IN信号中四个喷油信号中任何一个信号的下降沿到来时,CPLD都会监测其它三个喷油信号的状态,如果其它三个喷油信号的状态正常,即给出喷油信号正常标志,反之给出喷油信号异常标志。
对于PCM模块中频率变化较低(比如2Hz)的慢速信号,本系统采用RS232的总线读取方式由ARM 监测它们的周期变化。
3.4 现场总线通信子系统
由于整个系统的各个子系统之间需要双向传送大量的数据,因此对系统的通信性提出了很高的要求:一方面要有较高的通信速率;另一方面又要有较灵活的协议转换。由于CAN总线具有突出的可靠性、实时性和灵活性,因而得到了业界的广泛认同和运用[7]。本系统采用以CAN总线为主,兼有K-LINE、 GPIB、RS485、245总线的现场总线通信子系统,并可灵活组成多个通信子网,完成多模块测试的要求。本系统采用两个CAN子网(CAN0、 CAN1),对于每个PCM而言,信号发生模块和负载监测模块、PCM组成一个通信子网CAN 1。工控机通过通信子网CAN0将各个子网连接在一起。
信号发生子系统与工控机的CAN通信:(1)设置信号发生模块,其设置范围主要是CPS类型、启动CPS、启动正弦信号的产生及开关量输入继电器;(2)控制和读取PCM故障代码。信号发生模块是工控机与PCM通信的中转站。当工控机设置PCM或者在运行过程中读取PCM模块的故障信息时,首先通过CAN0向信号发生模块发送指令,信号发生模块接收到该指令后,只将ID更改后通过CAN1发送到PCM模块。同理,信号发生模块接收到PCM返回的 CAN报文后,只将ID更改后通过CAN0发送给工控机。考虑到不同PCM类型的通信接口差异,在信号发生模块和PCM之间还添加了KLIN总线。当要设置PCM或读取PCM的故障代码时,信号发生模块通过CAN0接收指令,转化成KLIN报文后,发送到PCM模块;同理,从PCM返回的KLIN报文,由信号发生板转换成CAN报文后通过CAN0返回到工控机。
#p#副标题#e#
负载监测子系统与工控机之间的CAN通信:(1)设置继电器矩阵。工控机向负载监测模块发送设置继电器矩阵的指令,负载监测模块接收到指令后,将继电器矩阵信息传递给对应模拟负载模块;(2)读取负载监测信息。在系统工作时,工控机不断向负载监测模块发送查询负载监测信息的指令,负载监测模块接收该指令后,将当前的PCM负载监测数据组合成CAN报文的形式发送给工控机。
此外,模拟负载子系统通过RS245总线与负载监测子系统相连,将继电器矩阵信息传输给各个模拟负载模块,完成负载的切换工作;大功率程控电源通过GBIP与工控机相连,接收工控机的电源设置;环境实验箱通过RS485 与工控机连接,接收其设置命令,调节环境温度和湿度。
4、结论
目前,该系统已成功用于长安CB系列的PCM、STC 1××和2××系列的PCM,验证了系统的通用性及可靠性。由于摩托车的PCM与汽车PCM原理相近,因此,它同样适合摩托车PCM耐久性测试。虽然该系统可能还存在一些缺陷,但通过不断地改进和升级,必将为开发控制系统提供扎实的设备保障。
参考文献
[1] 刘劲哲.汽车已进入自主研发时代[J].经济,2007,11:80.
[2] 胡挺,张士军.汽车故障诊断仪器设计和实现[J].计算机与数字工程, 2007,8(35):154-155.
[3] 张道文,姚春林.ECU信号测试装置的设计[J]小型内燃机与摩托车,2002,1(31):12-16.
[4] 霍亮生,王飞.发动机工况仿真测试系统[J].计算机仿真,2007,10:216-220.
[5] 李莉,王胜开,陆汝玉等.实用可靠性工程[M].北京:电子工业出版社,2004,256.
[6] 倪成强.基于DDS技术的AVR单片机信号发生器[J].科技创新导报,2007,32:212.
[7] 冉振亚.基于CAN总线的电动汽车控制系统设计[J].汽车工程,2006,2:225-227.












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论