硬件在环试验台架仿真
硬件在环仿真作为一种先进的仿真技术,它的出现改变了汽车控制系统的传统开发手段,通过硬件在环仿真系统模拟汽车的各种运行工况,可以对汽车控制系统的性能进行测试和评估,为汽车控制系统的开发及汽车部件的性能检测提供了方便快捷的途径。
目前,国内无级变速器匹配开发技术还相对落后。因此,为了快速开发需匹配CVT(continuously variable transmission)的整车,系统地评价整车性能,减少匹配的研发时间和费用,采用在环试验台架是一种很好的方式。本文为在环试验台架建立了数学模型,为开发在环试验台架奠定了理论基础。
发动机模型
CVT车型动力传动性能试验台离不开发动机来提供动力,为了建立汽车发动机模型,就必须得到发动机的转速调节特性曲线和万有特性曲线,即建立适合CVT控制系统必需的发动机关键数据。通过与发动机理论数据的对比,来判断CVT车型动力传动性能是否达到要求。
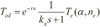
对于发动机模型的输出数据,一般是通过发动机台架实验所获得的数据,经过查表求得,要有一组发动机台架实验数据做基础如表所示。发动机模型一般采用稳态实验数据作为其稳态输出转矩,用动力学方程描述其动态特性。故发动机模型包括两部分:发动机稳态输出和发动机动力学特性。发动机稳态模型的输入参数是节气门开度以及发动机角速度,考虑到发动机的动态特性,将其简化为具有滞后的一阶惯性环节。因此,发动机的动态输出转矩为:
Te,j=?e,j(αe,ωe) (1)
Te=Te,j(t-τ) -kτ Te
式中,Te,j:发动机稳态输出扭矩;αe:节气门开度;?e,f:发动机稳态输出函数;ωe:发动机角速度;kτ:动态特性拟合系数;τ:滞后时间。
试验台所使用的发动机数据为力帆汽车发动机有限公司的内燃机数据,数据为节气门从0~100%开度下发动机的动力性数据及经济性指标。以节气门开度为5%为例,在此开度下发动机的部分原始数据如表所示。
发动机扭矩的输出大小,与发动机节气门开度以及转速有联系。由于汽车在行驶过程中大部分情况是工作在非稳态工况下。当节气门从一个位置变到另一个位置时,发动机的输出扭矩并不能随着节气门的变化而变化,这中间要经历一个动态响应过程。因此,应该将发动机的扭矩输出特性简化为具有一阶惯性环节来对其进行修正。其表达式为:
 (2)
(2)
式中,ne:发动机输出转速(r/min);s:拉氏变换因子;τ:滞后时间(s);kτ:动态特性的拟合系数;Ted:在非稳态工况下,发动机输出转矩(Nm);Te:在稳态工况下,发动机输出转矩(Nm);α:发动机节气门开度(%):
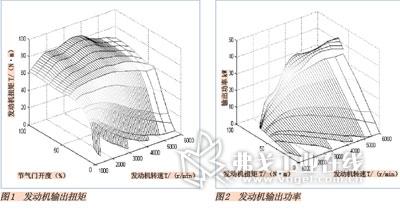
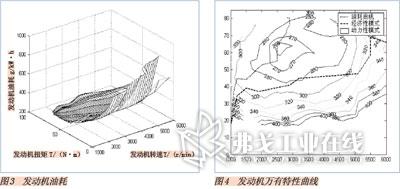
由发动机转速、节气门开度和发动机扭矩的数据所形成的发动机输出扭矩如图1所示。发动机输出功率可由发动机转速和发动机扭矩根据发动机特性求得,由发动机转速、发动机扭矩、发动机功率所形成的发动机输出功率数值如图2所示。
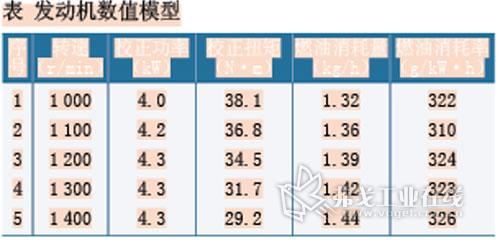
由于发动机动态特性对发动机燃油消耗影响不大,因此可用稳态的油耗模型代替其动态的油耗模型。由发动机转速、发动机扭矩和发动机油耗所形成的发动机油耗数值如图3所示。
负荷特性和速度特性只能用来表示某一转速或某一油量时,发动机各参数的变化规律,而发动机变化范围很广,要分析各种工况下的性能,就需要多张负荷特性或速度特性图,很不方便。为了简化,就用一张图较全面地表示发动机各种性能参数的变化,这就是发动机的万有特性,试验台发动机万有特性如图4所示。
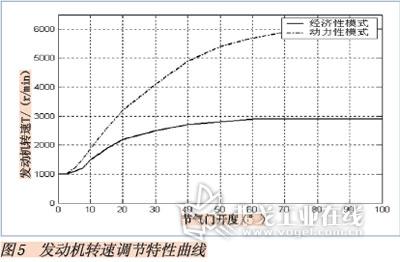
发动机转速调节特性是指需求特性的功率变化时,独立地调节传动装置的传动比,使发动机输出转速被稳定地维持在给定的工作点或指定的工作模式。对于发动机的工作模式,一般是指发动机的经济性模式或动力性模式。对于试验台架发动机,其转速调节特性如图5所示。
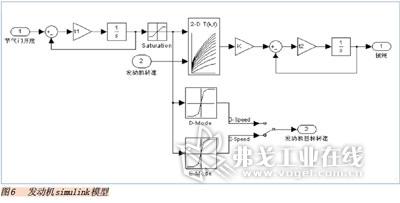
发动机simulink模型如图6所示,模型中,τ1是电子节气门一阶滞后,τ2是发动机扭矩一阶滞后,k为拟合系数。同时,对于发动机模型,还一并建立了动力性输出模式和经济性输出模式,即就是图形中的D-mode和E-mode。
CVT模型
CVT模型主要考虑其动力学模型和力的平衡关系。建模前先需假设:将金属带简化为三角带,不考虑带与带轮的变形,只考虑主动带轮的惯量,不考虑从动带轮的转动惯量。主动带轮的动力学方程为
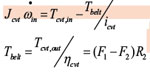
式中,Tbeιt:带传递转矩;F1、F2:带的紧边、松边张力;ηcvt:CVT传动效率;ωin:主动带轮的角速度;R2:带在从动带轮上的工作半径。
式中传动带上的张力是由作用在主、从动带轮上的轴向力产生的,其张力的大小可以从带的力平衡关系中(2)、(3)和(4)得出。
式中,Faxial:带轮轴向力;α:0.5倍带轮锥角;θ:带轮包角;m:带与带轮间的摩擦因数;β:带轮包角的动弧量;mm:带的单位质量;Fc:带的离心作用力;R1:带在主动带轮上的工作半径;Fi:带张力,当计算轴向力的带轮为从动轮时,Fi=F2;当计算轴向力的带轮为主动带轮时,Fi=F1带紧边和松边张力关系为:
 (5)
(5)
由式(4)和式(5)可知,对于一定带传递转矩的最小带轮轴向力为:
 (6)
(6)
为保证转矩的安全传递,即不打滑,式(6)中的最小带轮轴向力应剩以适当的安全系数Ksafe,即:
 (7)
(7)
通过以上力学关系可以求出一定安全系数传动情况下的带轮轴向力和张力变化情况。同时,为了方便对CVT的仿真,也可以将其简化为一个积分器。
整车模型
在整车模型中,汽车行使时的驱动力,与风阻、滚动阻力、坡度阻力和加速度阻力以及随机阻力平衡,其数学式如下:

式中,G:车身重量;Cd:风阻系数;i:道路坡度;?:滚动阻力系数;A:迎风面积;ν:车速;Frandom:随机阻力;m:车身质量。
进行车辆的燃油经济性和排放的性能模拟时,在车辆系统模型中只考虑纵向动力学特性。因此,此时车辆纵向动力学模型也可表示为(此时不考虑车轮的滑动):

式中,Fload:总负载阻力;βdrag:空气阻力项系数;Ffolling:汽车滚动阻力;αroda:道路坡度角;Fbrake:制动力。
汽车在行驶过程中,驾驶员是通过加速踏板和制动踏板来控制汽车的纵向行驶特性,CVT的速比控制系统按照一定的算法控制速比变化率的变化。因此,对于整个系统,输入量有:加速踏板行程α,制动踏板行程β以及CVT速比变化率 ,输出量有:车速ν和发动机转速ωe。
,输出量有:车速ν和发动机转速ωe。
仿真试验
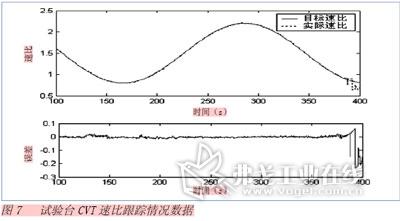
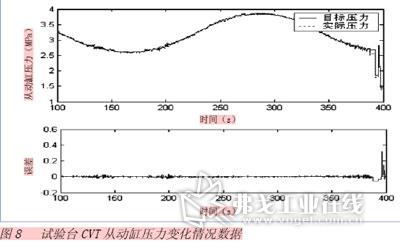
对仿真模型进行仿真试验,就可以对在环试验台架仿真模型进行验证。速比与压力都采用PID控制,我们通过CVT速比跟踪和CVT从动缸压力的变化情况来验证仿真性能模型的正确性,图7、图8为仿真实验情况。
由图7所示的CVT速比跟踪情况可知, CVT速比跟踪误差较小,说明该CVT速比跟踪效果良好,与实车实验结果一致。图8所示的CVT从动缸压力变化误差比实车实验更加小,进一步表明CVT从动缸压力控制精确。仿真结果基本与实车实验结果一致,说明仿真进行CVT传动性能检测是可行的。另外对于数据急剧变化的拐点处,误差较大,反映仿真还不能完全正确的模拟复杂工况下CVT运行情况,还有待改善。
结语
使用台架试验数据及理论公式建立了发动机的数值模型,开创性地建立了CVT的仿真模型,并对整车建立了动力学模型,数值模型的建立,是无级变速传动系统开发与匹配的基础。本文通过仿真试验结果,验证了模型的准确性,证明所建立的模型是完全可行的。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论