机器视觉系统抓件应用
图1 机器人应用视觉系统组成
在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,人们常用机器视觉系统来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且准确度不高,用机器视觉检测方法可以大大提高生产效率和生产的自动化程度。
在现代工业自动化生产中,涉及到各种各样的检查、测量和零件识别应用,例如汽车零配件尺寸检查和自动装配的完整性检查等。这类应用的共同特点是连续大批量生产、对外观质量的要求非常高,通常这种带有高度重复性和智能性的工作只能靠人工检测来完成,给工厂增加巨大的人工成本和管理成本的同时,仍不能保证100%的检验合格率。人们开始考虑使用把计算机的快速性、可靠性以及结果的可重复性,与人类视觉的高度智能化和抽象能力相结合的视觉系统。
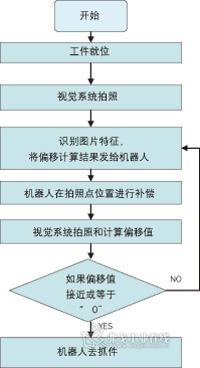
图2 机器人视觉系统抓件工作原理
机器视觉系统原理
用工业机器代替人眼来做测量和判断,首先采用CCD照相机将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布、亮度和颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,如面积、长度、数量和位置等;最后根据预设的容许度和其他条件输出结果,如尺寸、角度、偏移量、个数、合格/不合格以及有/无等。机器视觉系统的特点是自动化、客观、非接触和高精度,与一般意义上的图像处理系统相比,机器视觉系统强调的是精度和速度,以及工业现场环境下的可靠性。
典型的视觉系统(见图1)一般包括如下部分:光源、光学系统、相机、图像处理单元(或图像采集卡)、图像分析处理软件、监视器以及通信/输入输出单元等。视觉系统的输出并非图像视频信号,而是经过运算处理之后的检测结果。机器视觉系统抓件工作原理如图2所示。

机器视觉系统抓件应用
本系统运用MOTOMAN机器人、COMAU RecogniSenseTM System进行抓取侧围上线工作,侧围被放置于料架中,料架为上下两层,每层有九件侧围。本系统应用了光学成像原理,所以对外部环境要求比较严格。
1.抓件步骤
(1)记数平移抓件 对工装料车要求极为苛刻,稍有偏差,要不就无法抓件(接近开关检测不到),要不就会发生压件现象。最大问题是,料车上工件摆放层数与机器人所记的抓件数设定不符,就会导致机器人与料车及工件发生碰撞。
(2)光电开关感应减速,接近开关感应进行抓件 设定机器人抓件最高点示教位置和机器人抓件最低示教位置,抓件靠关电开关减速,接近开关感应到件,进行抓件。这样就会因料车上工件摆放层数与机器人所记的抓件数设定不符,造成机器人与料车及工件发生碰撞问题。还有新的问题,抓件时机器人已到抓件位置,但是接近开关没感应到信号,导致机器人一路往最低示教位置移动,直至机器人报警。

2.注意事项
(1)光线 光线在视觉应用中占绝对重要位置,环境光线要求柔和稳定。
(2)TCP 这里所说的TCP,是以相机TCP为基础的,相机焦距点延伸到工件平面上中心点的TCP,相机与工件拍摄距离不同,其TCP也会不同。
(3)图片的示教 根据使用视觉控制指令不同,图片中线条删取也会不同。
(4)镜头 我们发现广角镜头远比普通镜头稳定很多,以往普通镜头对光线变化极为敏感,特别是周边环境灯及抓手上灯位置稍加偏移也能导致视觉抓件不稳定。

抓件设置
视觉系统操作界面如图3所示。
1.设置焦点和曝光度
曝光度设置有4种模式可供选择:正常、明亮、更亮和最亮。这些设定可以控制摄像头的进光量。如果屏幕显示图像较暗,首先尝试调节摄像头光圈,如果效果仍不理想,就尝试调节曝光度设置。注意曝光度和焦点需在实时模式调节。
Vu Focus工具用于调整在激活窗口内的镜头焦点和光圈。在选择框里打钩,焦点工具被激活,图片上方会出现红色或绿色数字状态条。这个状态条显示拍摄质量,当转动镜头时,状态条会变化,调节的目的是使状态条变绿,并且显示数值最大。
当Vu Focus在被选状态下时,摄像屏幕左下角会显示光圈状态。它的作用在于对光圈设置的评估,作用范围在激活窗口以内(蓝色活动框)。通过调节摄像头光圈或通过软件改变曝光度设置,目的是使状态条呈现绿色并且波动线条尽可能平滑。曝光效果和对比如图4、图5所示。

2.图像示教
单击live image实时图片按钮,系统会显示摄像头的当前视野。再次单击会变为冻结模式。实时模式用于系统设定,如机器人编程、摄像头对焦、光圈设置和目标示教等。
如果实时图像未被激活,表明摄像头未与软件建立通信,可以通过加载图片来运行模拟模式。
视觉系统使用一键捕捉。单击teach按钮,视野区域中所有图像均被获取,并在已获取图片栏中显示获取图片。视觉系统是基于整体识别而不是基于特征,不需要对单个特征进行示教,系统一次捕捉整个物体,用户可选择性地擦除不需要的部分。
参数设置屏幕关闭后可以在活动窗口中看到绿色轮廓线。存储在系统中的绿点代表存储在系统中的图片数据。任何图像上的无关细节都应该被擦除。点击合适大小的擦除工具擦除绿色线条。

擦除背景、阴影线和易变形轮廓。依靠经验分清主次线条,注重整体轮廓,可擦除模糊细节,取景越大越能获取各方向控制线条,但是考虑摄像头焦距有限,综合考虑成像清晰度等因素选取合适拍照位置。
活动窗口现成为捕捉窗口。视觉系统每次都是在蓝色窗口内拍照捕捉并与图片栏中的工件进行比对。
3.图像处理
图像处理部分可以保存摄像头采集的图片或是加载已存图片文件。
关闭实时模式,save image保存当前图片,不包括其他图标和参数。
load image按钮每次调用一张已存图片。
loadsequence加载一系列图片。选择文件夹中某一图片,系统将加载文件夹中所有图片。
4.图像识别
图6中,按钮1用来识别当前屏幕图像。如果当前屏幕图像有匹配图片,在机器人通信部分会显示该示教图片的名字和位置。如果该物体不能被识别,则反馈物体名称为“unknown”。使用按钮2获取当前位置新图像,每单击一次刷新一次。按钮3作用类似按钮2,自动地不停循环识别。
5.参数设置
最后,修改示教物体的参数。单击图片栏内的图片可将物体重命名。
如图7所示,物体名称(Object name)是在软件系统界面中区分图片使用的名称;物体代码(Object binary code)是给予示教图片的数字名称,也用作讯息传输和区分车型;Sensor to object distance是工件到摄像镜头后端的距离,这个距离的测量对系统的正常运作很重要。
6.通信设置
视觉系统支持串口RS232和TCP/IP 通信协议。TCP/IP通信设置只需选择机器人类别,软件内部自动设置所有参数。这些设置只允许高级用户修改。
7.TCP设置和验证
TCP设置基本要素:
(1)TCP点在工件上,可以理解为相机的焦点就是TCP位置。
(2)根据相机位置和工件位置,计算出TCP的数值,输入机器人参数表
(3)视觉系统中,可以验证TCP正确性(见图8)
在旋转机器人各个方向的时候,绿色小框都应该在红色框内,代表TCP设置时没有问题。
应用意义
机器视觉系统的特点是提高生产的柔性和自动化程度,在一些不适合于人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉系统来替代人工视觉;同时在大批量工业生产过程中,用人工视觉检查产品质量效率低且精度不高,用机器人视觉检测方法可以大大提高生产效率和生产的自动化程度。而且机器人视觉易于实现信息集成,是实现计算机集成制造的基础技术。随着机器人视觉技术自身的成熟和发展,它将在现代和未来制造企业中得到越来越广泛的应用。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论