PMSM(IPM)磁路饱和对交,直轴电感的影响
基于车用永磁同步电动机的特点,以一台三相内埋式永磁同步电动机为例,借助Ansoft Maxwell软件采用有限元方法分析磁路饱和对交、直轴电感的影响,确定电动机的交、直轴电感矩阵,为进一步控制电动机提供指导。
人们对电动机驱动系统的要求不断提高,但与此同时,市场对设计研发的周期要求却越来越短,对电动机参数精度的要求也越来越高。目前所进行的控制技术算法研究所依据的永磁同步电动机(PMSM)的数学模型基本上都是在忽略电动机参数变化的情况下进行的。而内埋式永磁同步电动机(IPM)磁路不对称造成磁路非常复杂,磁路的饱和程度对电动机参数造成的影响使电动机在控制时误差大、精度低。
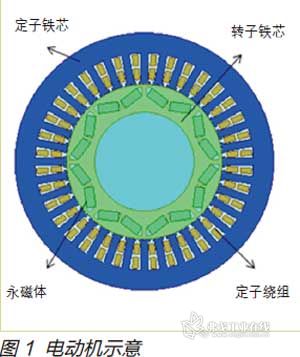
本文利用Ansoft Maxwell软件,以一台车用三相PMSM(见图1)为例,进行了有限元仿真分析,求解出了IPM的交、直轴电感矩阵,并总结了磁路饱和对交、直轴电感的影响趋势。
电动机模型的建立
1.电动机模型建立
使用Ansoft Maxwell软件的RMxprt模块选择Adjust speed synchronous machine将表一参数输入进行运算,通过磁路法快速建模完成,再将模型一键有限元导入Ansoft Maxwell进行有限元仿真。步骤如下:右击setup选择Create Maxwell design点击OK。

2.参数扫描
(1)添加电流激励
完成建模后,定子三相绕组添加电流激励,在Ansoft Maxwell里点击Excitations->PhaseA->,添加1.414Id cos(2π pn/60time)+1.414Iqsin(2π pn/60time),B相、C相相同。
B相绕组为:
1.414(-0.5Id-0.866Iq)cos(2πp?n/60time)+1.414(0.866Id-0.5Iq)×sin(2π pn/60time);
C相绕组为:
1.414(-0.5Id-0.866Iq)×cos(2π pn/60time)+1.414(0.866Id-0.5Iq)×sin(2π pn/60time)。
(2)添加扫描参数
由于计算量较大,在利用Ansoft MaxwellTM进行计算时,可以使用参数扫描。在Ansoft Maxwell中建立好电动机模型后,在Maxwell 2D->Data Properties下添加Id、Iq、n、p(n为转折转速、p为极对数、Id、Iq初值可任取)。在Excition中,各相绕组设置相应的电流源激励,然后在Maxwell 2D->Optimetrics Analysis->Add Parametrics下设置参数扫描范围。目前的做法是固定Iq,扫描相同Iq下不同Id的情况。将每次计算的结果进行傅里叶分解出电压基波幅值及相位。
根据永磁电动机矢量控制原理,定子电流Is分解到d-q轴系上的电流为Id、Iq,依据激励条件对Id进行参数扫描,电流扫描范围覆盖电动机所有工况。在实例中,Id扫描范围为0~100A,平均分成10段。
(3)仿真结果
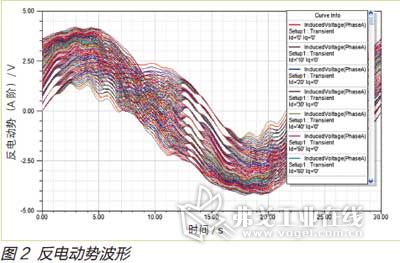
图2所示为不同Id、Iq电流组合的反电动势波形。反电动势正弦度的好坏影响其谐波含量,它的取决于定子绕组的排布方式及极弧系数的选取。反电动势的THD%是衡量电动机好坏的重要指标之一。在建模之前应该准确选取定子绕组类型,极弧系数可以采用有限元法进行优化。
在Ansoft软件中,对反电动势波形进行FFT分解,不同的Id、Iq电流组合下感应相电压基波分量所对应的反电势基波幅值及相位,两个参数将作为计算交、直轴电感的输入。
交、直轴电感矩阵表
1. 求解电磁矩阵
根据Id、Iq算出定子电流  ,然后算出定子电流的相位角
,然后算出定子电流的相位角  根据Ansoft Maxwell中将扫描结果相反电势基本分量幅值、相位,算出交、直轴电压
根据Ansoft Maxwell中将扫描结果相反电势基本分量幅值、相位,算出交、直轴电压  已知电动机转速n、永磁磁链基波幅值、P极数,求出电角频率
已知电动机转速n、永磁磁链基波幅值、P极数,求出电角频率  ,再求空载反电势基波有效值
,再求空载反电势基波有效值  ,然后求出
,然后求出  ,最后求出
,最后求出  ,单位为mH。
,单位为mH。
2. Ld、Lq电感矩阵表
表2和表3为电动机输入不同的Id、Iq组合所对应的交、直轴电感值,此表格可以为电动机控制提供指导。
结论
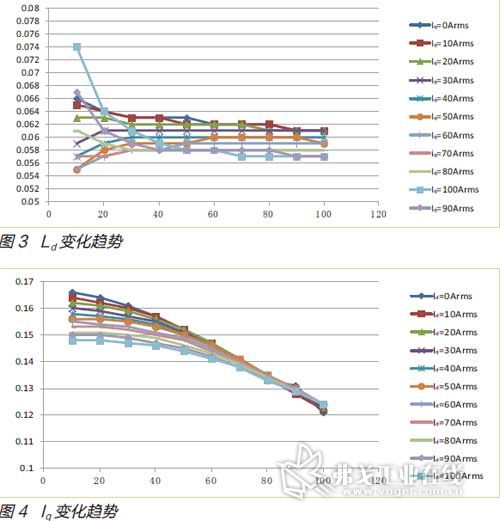
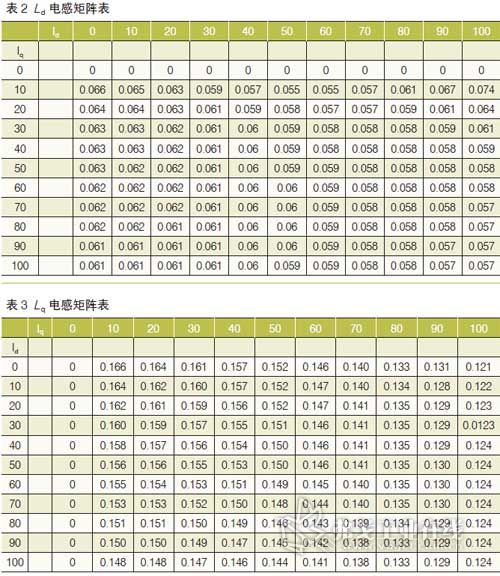
当Id从零逐步增大到100A的过程中,随着磁路的饱和程度增大,直轴电感Ld变化0.017MH(见图3),而当Iq从零逐步增大到100A的过程中,随着磁路饱和程度的增大,交轴电感Lq变化0.05Mh(见图4)。可见,在电动机控制时,可不考虑磁路饱和对Ld的影响,但要考其对Lq的影响。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论