无人驾驶感知技术介绍
引导语
如果把一台无人驾驶车辆比作一个人的话,那么激光雷达、毫米波雷达、摄像头、IMU及GPS等等部件就相当于人的眼睛、鼻子、耳朵、触觉及第六感等器官或系统。
环境感知作为无人驾驶的第一环节,处于车辆与外界环境信息交互的关键位置,其关键在于使无人驾驶车辆更好地模拟人类驾驶员的感知能力,从而理解自身和周边的驾驶态势。
激光雷达、毫米波雷达、超声波雷达、定位导航系统、视觉系统等为无人驾驶车辆提供了海量的周边环境及自身状态数据,这些以图像、点云等形式呈现的数据包含了大量与驾驶活动无关的信息。环境感知需要遵照近目标优先、大尺度优先、动目标优先、差异性优先等原则,采用相关感知技术对环境信息进行选择性处理。
人类驾驶员受限于视野范围,存在诸多驾驶盲区。无人驾驶车辆上安装的每类传感器也都有自身的感知盲区。实际上,这些区域仅相对于特定时刻而言,随着车辆的行进在下一时刻即会产生新的盲区。无人驾驶过程中,通过组合使用多类传感器和运用时序关联的感知技术,可以缩小感知盲区的范围,一般不会影响正常驾驶。

一、环境感知功能系统构成
无人驾驶车辆获取和处理环境信息,主要用于状态感知和 V2X 网联通信。状态感知主要通过车载传感器对周边及本车环境信息进行采集和处理,包括交通状态感知和车身状态感知。V2X 网联通信是利用融合现代通信与网络技术,实现无人驾驶车辆与外界设施和系统硬件配置方案之间的信息共享、互联互通和控制协同。
交通状态感知功能的实现依赖于环境感知传感器及相应的感知技术。按照获取交通环境信息的途径,可将这些传感器分为两类:1)被动环境传感器,该类传感器自身不会发射信号,而是通过接收外部反射或辐射的信号获取环境信息,主要包括摄像头等视觉传感器和麦克风阵列等听觉传感器;2)主动环境传感器,该类传感器主动向外部环境发射信号进行环境感知,主要指激光雷达、毫米波雷达和超声波雷达。
车身状态感知功能的实现主要基于 GPS(Global Position System, 全球定位系统)、北斗卫星导航系统( BeiDou Navigation Satellite System,BDS)、惯性导航系统(Inertial Navigation System,INS)等设备,旨在获取车辆的行驶速度、姿态方位等信息,为无人驾驶车辆的定位和导航提供有效数据。
V2X(即 Vehicle to Everything,车辆同所有交通参与者)网联通信强调了车辆、道路、使用者三者之间的联系,主要利用 RFID(Radio Frequency Identification,射频识别)、拍照设备、云服务器等获得实时路况、道路信息、行人信息等一系列交通信息,从而提高驾驶安全性和驾驶效率。
二、系统硬件配置
可用于无人驾驶环境感知的硬件设备有很多,主要包括摄像头、激光雷达、毫米波雷达、超声波雷达、GPS、BDS、INS 等,目前无人驾驶车上采用的配置方案往往是多种型号或多种类型设备的组合。
一般来讲,感知设备种类越多、价格越贵,精度相对越高、识别范围相对越大。但是每种感知设备都有其局限性。
无论是单目摄像头、双目摄像头,还是多目摄像头、深度摄像头,无论像素再清晰、采样速率再高,也无法解决所有图像采集和处理的难题。由于道路环境、天气环境的多样性、复杂性以及无人驾驶车辆本身的运动特性,摄像头容易受到光照、视角、尺度、阴影、污损、背景干扰和目标遮挡等诸多不确定因素的影响。而在驾驶过程中,车道线、交通灯等交通要素存在一定程度的磨损、反光是常态,因此不存在完全理想的摄像头。
雷达对光照、色彩等干扰因素具有很强的鲁棒性,激光雷达、毫米波雷达和超声波雷达也都有各自的优势。但是安装多少数量/种类的雷达、选取多高的采样速率,都不可能彻底解决凹坑反射、烟尘干扰和雨、雪、雾等恶劣天气条件下的探测难题,也难以实现真正的全天候、全天时、全三维,因此雷达不可能完美。
定位导航系统为无人驾驶提供了高精度、高可靠定位、导航和授时服务,RTK(Real-Time Kinematic,载波相位差分技术)+ INS 组合更是为实时精准定位和位置精度保持奠定了重要基础。但是无论位置服务公共平台多好、陀螺精度多高,还是存在采样频率不够、地理环境过于复杂、初始化时间过长、卫星信号失效等问题,因此定位导航系统总是存在缺陷。
可见,没有完美的感知设备,设备不理想是常态,也不存在完美无缺的设备组合方案。然而对于不同的驾驶任务而言,需要不同的感知设备种类和类型,并非要配置最全、最多、最贵的感知设备才能完成驾驶任务,而是要以任务需求为导向,有针对性地选取合适的感知 设备,组合实现优化配置。
三、传感感知技术
感知功能的实现既需要合适的感知设备,也离不开相应的感知技术。环境感知功能分工的不同,决定了所需感知设备和感知技术的差异。其中,交通环境感知是车辆对外界环境信息的捕获和处理,主要基于车载传感器和传感感知技术。按照传感器获取的信号类型,可分为摄像头视觉、雷达传感和听觉传感。
人类在驾驶过程中所接收的信息大多来自视觉,例如交通标志、 道路标志、交通信号等,这些视觉信息成为人类驾驶员控制车辆的主要决策依据。在无人驾驶中,摄像头取代人类视觉系统作为交通环境感知的传感器之一。相较于其他传感器,视觉传感器安装使用的方法简单、获取的图像信息量大、投入成本低、作用范围广,并且近些年更是得益于数字图像处理技术的快速发展和计算机硬件性能的提高。但是在复杂交通环境下,视觉传感器依然存在目标检测困难、图像计算量大、算法难以实现的问题,视觉感知技术在应对道路结构复杂、人车混杂的交通环境时也还存在很多不足。
无人驾驶中配置的视觉传感器主要是工业摄像头,与民用摄像头相比具有更大优势,例如较高的图像稳定性、传输能力和抗干扰能力。按照输出的数据信号,工业摄像头可分为模拟式和数字式两种。模拟摄像头的输出为模拟电信号,需要借助视频采集卡等组件完成数字信号转换,该类摄像头连线简单、成本较低,但是转换速率慢;数字摄像头所采集的图像直接通过内部感光组件及控制组件转换为数字信号,该类摄像头采集速率快、数据存储方便,但是价格相对昂贵。
视觉感知技术主要包括三种:1)单目视觉技术,即通过单个摄像头完成环境感知任务,具有结构简单、算法成熟并且计算量较小的优点,但是感知范围有限、无法获取场景目标的深度信息;2)立体视觉技术,基本原理是采用 2 个(或多个)摄像头从不同视点观察同一目标,并通过计算图像像素间位置偏差恢复三维场景,难点在于寻找多个摄像头图像中匹配的对应点;3)全景视觉技术,成像视野较宽,但图像畸变较大、分辨率较低。
近年来,深度学习(Deep Learning)在计算机视觉和图像处理领域的应用取得了巨大成功,基于深度学习的图像处理成为无人驾驶视觉感知的重要支撑。深度学习的输入可以为原始的图像像素,通过构建含有多隐层的机器学习模型模拟人脑的多层结构。经逐层抽取得到的信息特征,相比传统图像处理算法构造的特征更具表征力和推广性,大大地提高了目标检测和识别的准确性。在无人驾驶视觉感知中,深度学习多用于对车辆、行人、交通标志等交通要素的检测和识别。由于深度学习需要大数量、多样性的数据集,而且对计算平台的性能要求高,目前大多仅应用于离线数据的处理。视觉传感器的配置参数和视觉感知技术的算法优劣共同决定了视觉感知系统的性能。
在国内外无人驾驶车辆开发过程中,传感感知技术研究的重点除了视觉就是雷达。雷达通过对目标发射电磁波并接收目标回波来获得目标的距离、方位、距离变化率等信息。得益于其主动探测的环境探测模式,雷达感知比视觉感知受外界环境的影响较低,近年来在无人驾驶中发挥的作用也较大。
雷达传感器一般由发射机、发射天线、接收机、接收天线、显示器、处理部分以及电源设备、数据录取设备、抗干扰设备等辅助设备构成。按照电磁波的波段,雷达分为三类:激光雷达、毫米波雷达、超声波雷达,如下图所示。


激光雷达工作在红外和可见光波段,是一种以激光为工作光束、 使用光电探测技术手段的主动遥感设备。具有分辨率高、隐蔽性好、 抗有源干扰能力强、定向性好、测量距离远、测量时间短的特点;不足之处在于技术门槛和成本较高(2020年随着竞争的加剧激光雷达的价格已经大幅度降低),而且在云雾雨雪等恶劣环境中衰减严重。
根据探测原理,激光雷达分为单线(二维)激光雷达和多线(三维)激光雷达。单线激光雷达仅通过一条扫描线进行旋转扫描,获取二维扫描范围内的深度信息,如德国 SICK 光电设备公司研发的 LMS 系列,在无人驾驶中常用于自动跟车行驶;三维激光雷达,通过综合多条扫描线旋转扫描的结果,得到空间范围内的深度信息,能够有效捕获目标的基本特征和局部细节,测量精度和可靠性很高,如美国Velodyne LiDAR 公司的 HDL 系列,常用于测距、测速和三维成像。
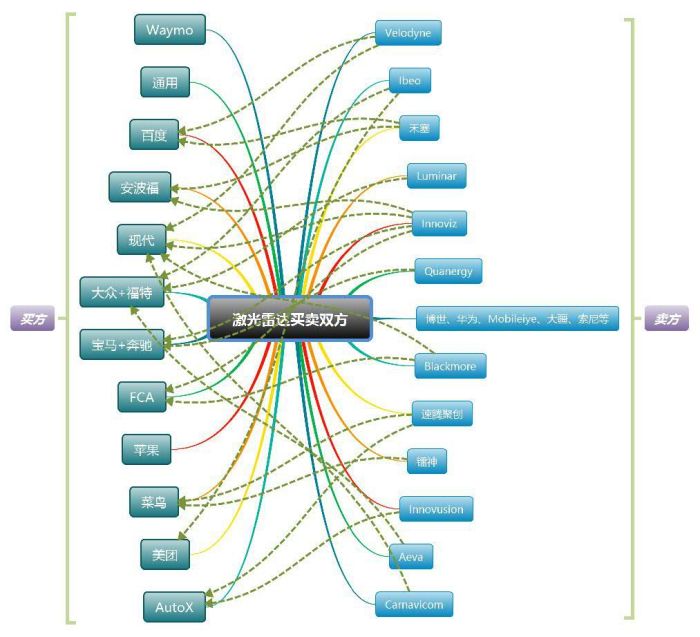
据粗略统计,目前共有80-100家公司从事与激光雷达相关的产业。而各自动驾驶公司又不愿意把鸡蛋放在同一个篮子里,都选择了好几个激光雷达厂商作为合资伙伴;甚至,在同一台测试车辆上将不同厂家激光雷达混用也不是新鲜事。
毫米波雷达工作在毫米波波段,频率在 30-300GHz 之间。具有体积小、质量轻、分辨率高、抗干扰能力强且便于安装的特点,能够精确测量目标的相对距离和相对速度。但是由于毫米波是重要的雷达频段,在很多场合会受到干扰。
按照测距原理,可以将毫米波雷达分为两类:1)脉冲式毫米波雷达,其基本原理与激光雷达相似,由于探测技术复杂、成本较高,很少用于无人驾驶;2)调频连续式毫米波雷达,具有穿透力强、精度高、稳定性高、抗干扰能力强的优势,能够在雨雪等恶劣条件下正常工作,而且结构简单、成本低廉,容易实现近距离探测。
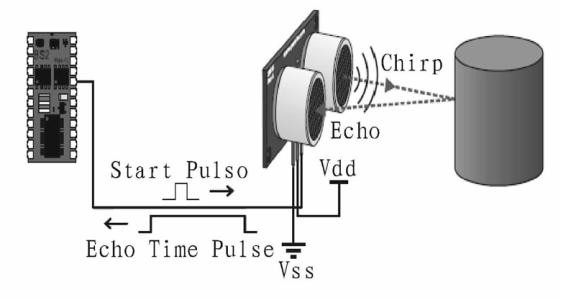
超声波雷达工作在机械波波段,工作频率在 20KHz 以上。超声波雷达多用于测距,如下图所示,其基本原理是通过测量超声波发射脉冲和接收脉冲的时间差,结合空气中超声波的传输速度计算相对距离。超声波测距的优势主要有四点:对恶劣天气不敏感,穿透性强、衰减小;对光照和色彩不敏感,可用于识别透明和漫反射性差的物体;对外界电磁场不敏感,适用于存在电磁干扰的环境;原理简单、制作方便、成本较低,容易进行市场推广。但是超声波雷达也存在很大的不足,测距速度无法与光电测距和毫米波雷达测距相比,而且无法测量方位,应用领域受限。
雷达传感器对目标信息的感知来源于自身发送的电磁波。相比被动传感器而言,雷达受外界环境影响小,获取的深度信息可靠性高, 测距范围和视角大、准确度高。另外,雷达每帧接收的点云数据量远小于摄像头记录的图像信息,更能满足无人驾驶对实时性的需求。
无人驾驶感知过程中,毫米波雷达和超声波雷达的主要作用即为测距和测速,目前在盲点探测、自适应巡航、前/后方碰撞预警等技术中应用较为广泛。除了距离和速度,激光雷达还能够较为准确地获取目标的形状、深度等信息。随着激光雷达性能的提高,相应的激光雷达感知技术也在不断发展。目前常用的感知技术主要有:障碍物检测与跟踪、路面检测、三维重建等。
目前大部分无人驾驶车辆仅依靠视觉感知和雷达感知,已经能够完成绝大多数交通环境感知任务,因此往往忽略了听觉感知,很多无人驾驶车辆甚至是“聋子”。然而在人类驾驶员开车时,交通环境中有许多声音也会携带重要信息,例如喇叭、警笛等,这些信息能够帮助驾驶员做出即时反应,包括改变车辆行驶速度和行驶方向等。无人驾驶车辆同样需要对环境中的声音有所感知并做出反应,这些声音一般无法通过摄像头或雷达获取,而是需要开发车辆的“耳朵”,让听觉传感感知系统能够真正发挥作用。
四、定位及导航技术
无人驾驶的基础是自主导航,不仅需要获取车辆与外界环境的相对位置关系,还需要通过车身状态感知确定车辆的绝对位置,因此定位与导航也是环境感知的关键技术之一。
无人驾驶车辆的位置数据不可能脱离感知态势的基准(常说的坐标系)而独立存在,不同的基准对应的车辆定位表现结果有很大差异。目前在无人驾驶中常用的基准包括:大地坐标系(WGS-84/ CGCS2000)、摄像机坐标系、图像坐标系、雷达坐标系、驾驶员认知坐标系等。选定基准之后,将车身姿态、周边环境和地图等信息都进行映 射并标注,生成基于这些坐标系的一张或多张图上。在这些图中,基于驾驶员认知坐标系的驾驶态势图能够更好地体现选择注意性,可以与车辆实现同步移动。
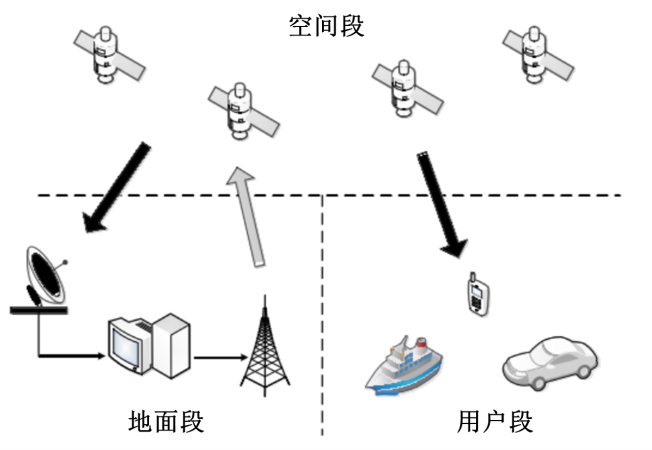
卫星导航系统都由空间段(导航卫星)、地面段(地面观测站) 和用户段(信号接收机)三个独立部分组成,如图所示。卫星导航的基本原理是测量已知位置的卫星到用户接收机之间的距离,并综合多颗卫星的数据计算出用户所在地理位置信息。
目前主要有GPS、北斗卫星导航系统、GLONASS 和 GALILEO四大全球卫星导航系统,我国常用的为 GPS 和北斗卫星导航系统。
GPS 是由美国国防部研制的全球首个定位导航服务系统,空间段由平均分布在 6 个轨道面上的 24 颗导航卫星组成,采用 WGS-84 坐标系;北斗卫星导航系统是中国自主研发、独立运行的全球卫星定位与通信系统,是继美国的 GPS、俄罗斯的 GLONASS 之后第三个成熟的卫星导航系统,空间段包括 5 颗静止轨道卫星和 30 颗非静止轨道卫星, 采用我国独自建立使用的 CGCS 2000 坐标系。这两种导航系统都可在全球范围内全天候、全天时为用户提供高精度、高可靠的定位、导航和授时服务,北斗卫星导航系统拥有更多的地球同步轨道卫星,还兼具短报文通信能力。
卫星导航定位技术按照定位方式分为单点定位技术和相对定位技术:单点定位是根据单独一台信号接收机的观测数据确定用户绝对位置的方式,容易受到系统性偏差的影响;相对定位是利用两台以上接收机的观测数据来计算观测点相对位置的方法,定位精度较高。相对定位又分为静态定位和动态定位两种类型,其中实时动态定位 RTK 技术是一种新的常用的卫星定位测量方法。
RTK 是一种基于载波相位观测值的定位技术,利用了参考站和移动站之间观测误差的空间相关性。与以前的静态定位和动态定位不同,RTK 无需事后结算即可在野外实时得到厘米级的定位精度,成为卫星定位应用的重大里程碑。RTK 属于广域定位技术,对天气状况和周边障碍物不敏感,但还是存在几点问题:1)初始化时间较长,主要受到卫星数、电离层、多路径等综合影响;2)工作距离短,基站覆盖范围一般不超过 15km;3)对卫星数量需求较高,在 6 颗以上卫星时作业较为可靠;4)存在信号失锁,卫星信号常常在隧道、高楼等严重遮挡的环境下失效。这些技术缺陷限制了 RTK 技术的应用,网络 RTK(又称 COS)应运而生。网络 RTK 是由多个基站组成的网络,通过将数据统一传送至网络服务器,并由服务器根据移动站和网络中基站的位置关系从最近的基站发送数据,或者在移动站附近虚拟出基站信息进行差分解算,从而提高移动站与基准站的误差相关性,获得高精度的定位结果。
惯性导航系统(简称惯导)由陀螺仪和加速度计构成,通过测量 运动载体的加速度和角速率数据,并将这些数据对时间进行积分运算,从而得到速度、位置、姿态和航向。惯导以牛顿力学定律为基础,工作原理是根据陀螺仪的输出建立导航坐标系并给出航向和姿态角,再根据加速度计的输出解算运动载体,实现惯性参考系到导航坐标系的转换。惯导属于推算导航方式,即在已知基准点位置的前提下根据连续观测推算出下一点的位置,因而可连续测出运动载体的当前位置。
惯性导航系统能够提供包括水平姿态、方位、速度、位置、角速度和加速度等的全面的导航信息,而且数据更新率高、连续性好、噪点低、短期精度和稳定性高。由于惯导是一种不依赖于外部信息、也不向外辐射能量的自主式导航系统,它不受外界电磁干扰的影响,具有全天候、全时段、全地域的工作特性。
由于导航信息是根据积分计算所得,惯导也存在其固有缺陷:定位误差会随时间而增大,数据的长期精度较低,而且无法获取时间信息。另外,惯导在每次使用之前需要较长时间的初始化,在无人驾驶过程中如果出现断电等突发状况,往往需要重新初始化。交通环境复杂多变,单一的导航系统往往会受限于自身的不足而无法确保精准定位和导航,因此当前的无人驾驶车辆大多采用GPS/BDS + INS 的组合导航方式。
姿态和状态感知无人驾驶车辆环境感知系统对车体的感知包括两部分:车身姿态感知和车身状态感知。姿态感知和状态感知对应的车辆信息不同,信息来源也有所差异。
无人驾驶对定位导航系统的性能有一定的要求,需要通过测试得到性能指标数值作为衡量依据。测试指标一般包括:1)首次定位时间,用于测试接收终端搜索信号的速度;2)定位测速精度,一般包括水平和高程定位精度;3)失锁重捕时间,能够反应接收终端在信号失锁后恢复定位的快慢;4)跟踪灵敏度,主要评估定位状态下接收机维持定位精度所需的最小信号功率;5)捕获灵敏度,代表了失锁状态下接收机捕获弱信号的能力。
实际驾驶时,车辆在不同场景下对导航系统的定位性能需求不同, 例如,正常环境下需要关注的指标为跟踪灵敏度,但是在隧道等信号遮挡严重的环境中更需要关注捕获灵敏度。因此导航系统的性能测试一般会有针对性地设置特定场景。
数字地图是以数字形式将纸质地图的要素存储在计算机上,并可以显示在电子屏幕上的地图。数字地图能够表示远大于纸质地图的信息量,可以进行任意比例、任意范围的绘图输出,而且地图上的内容易于修改、组合和拼接。数字地图主要有六个特点:1)快速存取和显示;2)可以动画形式呈现;3)地图要素可分层显示;4)图上的长度、角度、面积等要素可自动测量;5)可进行传输;6)利用 VR(Virtual Reality,虚拟现实)技术可将地图立体化、动态化。
五、V2X网联通信技术
近年来,随着物联网、大数据、“互联网+”等新技术的兴起,智能交通系统(ITS,Intelligent Transport System)在智能网联、车联网方面也有了长足发展。作为 ITS 的重要载体,无人驾驶汽车不再是孤立的个体,仅关注车辆与周边道路环境已无法满足安全、高效、节能、行驶的更高要求,需要进一步实现车辆与外部节点间的信息共享和控制协同,V2X 网联通信技术将成为未来无人驾驶发展的重要技术支撑。
V2X 网联是基于物联网,运用 D2D(Device to Device,终端直通)以及信息通信等技术实现车辆与外界互联的无线通信技术。欧美 和日本较早展开 V2X 网联技术研究,美国在 2010 年颁布了以 IEEE802.11P 作为底层通信协议和 IEEE 1609 系列规范作为高层通信协议的 V2X 网联通信标准。与之相比,V2X 在我国发展相对较晚,2015 年才开始相应研究;2016 年国家无线电委员会确定了我国的 V2X 专用频谱;同年 6 月,V2X 技术测试作为第一家“国家智能网联汽车试点示范区”及封闭测试区的重点布置场景之一;2017 年 9 月 19 日, 我国首部 V2X 应用层团体标准《合作式智能交通系统车用通信系统应用层及应用数据交互标准》正式发布。
无人驾驶对V2X 网联通信提出了以下几点技术要求:网络接入时间短、传输时延低、传输可靠性高、干扰性低、信息安全性高、频谱可再利用。另外,还需要对海量数据进行分析与处理,这就要求 V2X 技术可以合理借助各类感知传感器,并从获取的数据中探索规律进行有效表示。
V2X 技术的实现一般基于 RFID、拍照设备、车载传感器等硬件平台。V2X 网联通信产业分为 DSRC ( Dedicated Short Range Communication,专用短程协议)和 LTE-V2X 两个标准和产业阵营:DSRC 的设备组成包括车载单元(OBU,On Board Unit)、路边单元(RSU,Road Side Unit)、控制中心等。1999 年,美国联邦通信委员会专门分配了无线频率 5.9GHz 频段内 75MHz 频谱,作为智能交通系统中 DSRC 的专属频谱。作为以 IEEE802.11p 为基础的标准,DSRC 可以在数百米的特定区域内实现对高速移动目标的识别和双向通信。DSRC 的优势在于技术成熟可靠,能够保证低时延和安全可靠性,因此依然是当下市场主流的 V2X 标准。
DSRC 能够支持的最高车速为 200km/h,数据传输速率一般为12Mbps,反应时间为 100ms 以内,低时延达到 20ms。另外也存在一些不足,包括覆盖范围小、传输速率低、易受到建筑物遮挡、处理大 量数据较慢、建设成本较高等。目前,DSRC 在不停车收费(ETC 系统)、车队管理、出入控制、信息服务等领域已经有广泛应用。
LTE-V2X 基于现有蜂窝移动通信支持(3G/4G),拥有自主知识产权。相比 DSRC,LTE-V2X 的起步较晚:2015 年初,国际标准化组织 3GPP(3rd Generation Partnership Project,第三代合作伙伴计划) 启动了 LTE-V2X 的业务需求研究工作,明确了对 LTE-V2X 在时延、覆盖范围、可靠性、安全性等方面的要求;2016 年 9 月完成了 LTE-V2X 第一阶段标准,优先实现了基于 D2D 的 V2V 标准化。
中国通信标准化协会(CCSA)已经针对 LTE-V2X 先后开展了需求与系统结构、无线空口技术和频谱需求等项目的研究工作,工信部、发改委和科技部等政府部门和高通、华为等公司也在大力推动 LTE-V2X 技术的产业化发展。
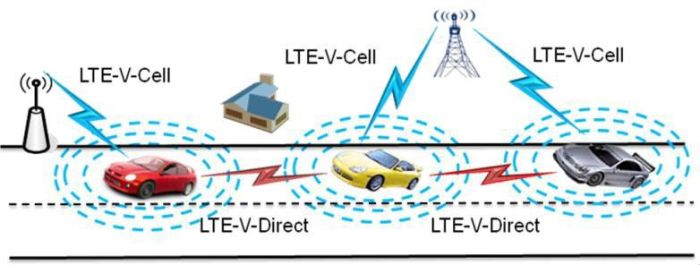
LTE-V2X 技术按照通信方式分为集中式(LTE-V-Cell)和分布式(LTE-V-Direct)两种,如图 2-6 所示。LTE-V-Cell 以基站为分布中心,需要现有蜂窝网络的支持,具有带宽大、覆盖广的通信特点,能 免实现远距离通信;LTE-V-Direct 独立于蜂窝网络,是一种车辆与周边环境节点直接通信的技术,具有低时延、高可靠的优势。
目前,LTE-V2X 仍在研发测试阶段,但是已形成可运营的完整网络体系,能够在高频段(5.9GHz)、高车速(250km/h)、高车流量的环境下提供可靠的通信能力,并且在大容量、低时延、抗干扰性以及可管理性等方面更为成熟。LTE-V2X 具有三点优势:1)部署成本低, 可以重复利用既有蜂窝网络的基础设施;2)覆盖范围广,可扩展至数百米以上的非视距范围;3)数据传输速率高,峰值上行 500Mbps、下行 1Gbps。对国内企业而言,采用 LTE-V2X 还有助于规避专利风险。
V2X 网联通信集成了 V2N、V2V、V2I 和 V2P 四类关健技术:1)V2N(Vehicle to Network,车-互联网),主要是通过网络将车辆连接到云服务器,能够使用云服务器上的娱乐、导航等功能;2)V2V(Vehicle to Vehicle,车-车),指不同车辆之间的信息互通;3)V2I(Vehicle to Infrastructure,车-基础设施),主要包括车辆与道路、交通灯、路障等基础设施之间的通信, 用于获取交通灯信号时序、路障位置等道路管理信息;4)V2P(Vehicle to Pedestrian,车-行人),指车辆与行人或非机动车之间的交互,主要是提供安全警告。
四类技术的感知范围不同,为无人驾驶提供的信息和能力也有所差异:
通过 V2N 技术,无人驾驶车辆可以提高收集数据的能力, 并且通过对这些数据进行模拟和调优,不断提升无人驾驶体验效果。V2N 还可提供实时路况、获取远程交通信息、发出交通事故警报等 , 从而减少拥堵、提高驾驶效率。
V2V 技术有助于无人驾驶车辆获取周边车辆运行信息,包括相对位置、行车环境等,为行车提供防碰撞警示提醒。V2V 还可为进一步缩短车辆之间的安全距离提供可靠信息。
V2I 为无人驾驶提供交通信号灯状态、交通管制信号等交通道路信息,为车辆选择加减速时机和改变行驶路线提供依据,进而控制道路整体通行速度,提高驾驶安全性。
V2P 技术通过向无人驾驶车辆提供周边行人状态信息,保证行人的安全,提高道路安全服务质量。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论