浅谈自动驾驶车辆电子地图的构建
电子地图在导航中的作用
自主导航是自动驾驶车辆基本的功能之一,自主导航技术是实现在宏观层面上引导自动驾驶车辆按照设定路线或者自主选择路线到达目的地的关键技术。自动驾驶车辆驾驶过程可以理解为有目的地、安全有效地引导车辆从出发地到目的地的导航过程,在确定了出发点和目的地位置以及车辆可能经过的各种环境信息之后,自动驾驶车辆导航需要解决如下三个关键问题:
(1)如何确定自动驾驶车辆的精确的实时位置。
(2)如何确定自动驾驶车辆从当前实时位置到目的地之间的行驶路径
(3)如何确定当前自动驾驶车辆行驶的方向、速度等参数。
第一个问题实际上就是自动驾驶车辆的定位问题。目前用来解决这一问题的主要方法有两类:一类是基于GNSS(Global Navigation Satellite System)、惯导、里程计和电子地图中的一种或几种的组合定位方法;另一类是基于雷达、相机的同步定位与构图(Simultaneous Localization and Mapping,SLAM)方法。组合定位通过使用卡尔曼滤波等信息融合算法对多种传感器的位置数据进行处理,得到更加精确的定位结果,该方法在GNSS信号较好或短时间丢失信号时有较高精度,但在信号持续丢失的情况下会出现累积误差;SLAM方法通过匹配传感器的环境感知结果进行定位,同时构建周围的环境地图,该技术理论上可以达到厘米级的定位精度且不需要借助卫星定位系统。但目前多采用先建图再进行匹配定位的方法,在线SLAM技术还不成熟,阻碍了实际应用。
第二个问题是自动驾驶车辆的路径规划问题。它包括基于电子地图的全局路径规划和基于雷达、相机等传感器的局部路径规划两个方面。全局规划利用已知地图事先生成从起点到终点的自动驾驶车辆行驶路径,局部规划则是在全局规划路径的基础上,结合车辆周围实时环境和交通状况对行驶路径进行局部的动态调整。由于局部路径规划受传感器感知范围的限制,有时无法得到全局最优解,特别是在城市道路中一些较大的路口,传感器往往无法有效感知整个路口的情况,规划结果容易与全局最优路线出现较大偏差,甚至将车辆引导到错误的行驶路线上。这种情况就要求全局规划生成的自动驾驶车辆导航路径不仅能够完成最优路径的搜索,还需要具有较高的位置精度和路径引导准确性,便于自动驾驶车辆对路径进行快速且有效的跟踪,同时降低局部规划的难度。目前的全局规划研究大多集中在拓扑结构层面的最优路径搜索上,路径精准性方面的研究较少。
第三个问题研究如何根据当前的导航路径确定自动驾驶车辆实时方向和速度的控制量。传统的电子地图上会提示不同路段的不同速度限制。但这种限制会很粗略,不能准确描述道路曲率与道路的路面条件等与车辆行驶速度之间的关系。
综上所述,自动驾驶车辆导航的实现需要多种技术以及多方面数据的结合,而地图在其中扮演着重要角色,它是解决该问题必不可少的基础性知识。
传统电子地图与自建高精度地图
传统汽车导航的“受众”是人,而自动驾驶车辆导航的“受众”是计算机,后者需要导航路径有更高的连续性与精准性,要求路径上的位置点分布均匀细密且坐标足够精确。现有传统电子地图在路径搜索问题上已经取得了很多成果,较为成熟。但在导航的精准性问题上,目前只达到了为人类驾驶员导航的水平,还不能满足自动驾驶车辆导航的需求。
在传统车载导航系统中,国内外目前已经形成了一些较为成熟的导航电子地图格式,有国际上通用的 GDF(Geographical Data File)、日本的 KIWI以及美国的 SDAL(Shared Data Access Library)等标准。我国车载导航技术发展迅速,且已经开发了一些比较成熟的导航产品,目前国内较大的车载导航公司有四维图新、高德与凯立德等。此外,基于手机等移动设备的电子地图近几年发展迅速,谷歌、百度和高德等公司相继开发了自己的网络电子地图服务应用,可以为用户提供基本地图展现、搜索、定位、地理编码、路线规划与导航和LBS(Location Based Service)云存储与检索等功能。这些系统具有很强的交互性、现势性和很高的地图精度。同时,供应商还开放了他们的地图服务的应用程序接口,用户可以利用免费的地图 API(Application Programming Interface)进行基于web和移动设备的地图、定位、导航、LBS 等开发。这种基于网络和移动设备的导航电子地图具有很多传统车载导航系统无法比拟的优势,已经在汽车导航方面取得了广泛应用。
相对于传统的有人驾驶导航,无人驾驶对导航路径的精度、准确性和连续性要求更高,需要研究比传统汽车导航更加精准的技术方案。自动驾驶车辆导航地图的构建是实现这一技术的关键之一。谷歌、奔驰等公司的自动驾驶车辆研发团队目前主要采用自行构建高精度驾驶地图的方式,分为数据采集、数据处理和道路建模三个步骤。首先使用激光雷达或相机等传感器进行道路环境数据的采集,然后进行数据的提取与融合等处理,最后通过环境建模的方式生成地图。
该地图含有大量的道路环境信息,可以为自动驾驶车辆进行精度在厘米级的精确导航和定位。如图1所示,谷歌利用三维激光雷达采集周围环境数据,使用基于粒子滤波(Particle Filter,PF)的离线SLAM算法,在保证配准精度的同时减少了用于配准的点云数据量,极大地提高了地图构建效率。此外,奔驰利用摄像头相机采集道路环境信息,构建基于视觉的车道级地图,主要存储道路的车道线、路边沿数据以及红绿灯、交通标志等。该类方法虽然可以大大提高自动驾驶车辆的定位和导航精度,但由于需要事先进行大量的数据采集和处理,随着地图覆盖范围的扩大,其工作量、耗时、成本以及所需的存储空间都会大大增加。
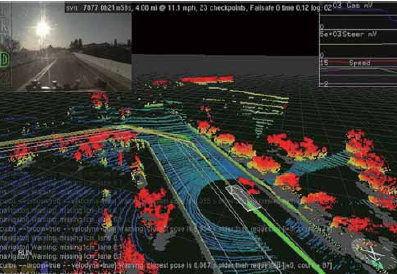
图 1 谷歌高精度三维地图
不过,自建地图的方式并不是完美的,系统还存在着一些问题:基于电子地图的自动驾驶车辆导航技术的重点在于导航地图的构建和对地图数据的处理。传统导航地图与自建高精度地图相比,两者各有优势,也都存在一些问题。传统导航地图的优点是:地图覆盖范围大,路网信息完整;大部分地区的地图数据精度较高,可达到亚米级;全局规划能力强,且支持动态规划,最后,无须自行采集,成本低。在具备优势的同时也存在一些问题:国内地图数据经过加密处理,无法直接使用;路网数据稀疏,不能满足自动驾驶车辆对导航数据连续性与准确性的要求,部分地区路网信息不准确,数据不全或精度较差。
相比之下,自建高精度地图的主要优点是:地图数据精度高,最高可达到厘米级;导航路径符合车辆运动特点。存在的主要问题是:数据采集、地图制作成本高昂,费时费力和数据量巨大,占用存储空间多。
融合的方式
基于两种地图各自的优缺点,一种融合的方式可以扬长避短,达到最佳效果。
1.地图架构
综合考虑自动驾驶车辆导航的精度和成本,采用传统导航电子地图与自建高精度地图结合的方式,在城市中的大多数公开路段使用传统导航电子地图,而在传统地图路网数据缺失或精度较差(位置数据误差大于自动驾驶车辆导航允许的最大误差)区域使用由自行采集数据构建的高精度地图。设计一种关联文件(包括关联点和关联区),用来实现联合路径规划时两种地图路网数据的关联。图2显示了导航地图的主要组成部分以及各部分间的从属关系。一个传统导航地图(以下简称“全局地图”)含有多个通过车辆自行采集数据构建的地图(以下简称自适地图),每个自建地图都有其对应的用于路网关联的关联点和关联区,全局地图的路网不精确区域完全包含于自建地图的关联区内,自建地图的关联点位于关联区外。
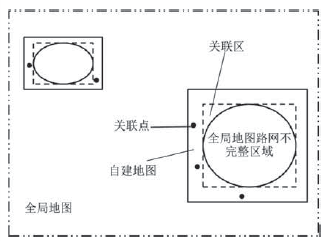
图 2 自动驾驶车辆导航地图架构
在该地图模型中,全局地图中的路网数据内容和结构保持不变。自建地图的数据来源于采集车辆沿道路或车道中心线行驶的 RTK-GPS 轨迹,由一块指定区域内的自行采集的全部路网数据组成,采用与传统导航地图类似的数据结构。
2.地图路网的数据结构
(1) 数据基本要素
在自动驾驶车辆导航地图模型中,路网的基本要素为节点、形状点和路段。其中,节点(node)和形状点是矢量数据中的点要素,路段是矢量数据中的线要素。自建地图中各要素的名称与传统导航地图中路网要素相同,但在定义上有所区别。
节点是指道路与道路间的交叉点以及一条道路的起点和终点。节点通常用基于大地坐标系的经纬度表示,且位于道路或车道的中心线上。形状点(Shape Point)是指道路中除交叉路口和起点、终点外,道路形状、方向等属性发生变化的点。在误差允许范围内,为了简化地图模型并尽可能精确描述道路的几何形状,将实际道路中的曲线用一组直线段组成的连续折线代替,每个直线段的端点都是形状点。此外,形状点还包括道路宽度、车道数等道路几何属性发生改变的位置,因为这些位置会对自动驾驶车辆导航路径的优化和引导效果产生较大影响。例如在某个位置道路宽度变窄,导致自动驾驶车辆的可行驶区域变窄,从而使自动驾驶车辆在该路段的局部路径规划和转弯处的导航路径优化都要做出相应的调整。路段(segment)是指相邻两个点要素(节点或形状点)间的连线,是描述道路的线要素最小单元。相邻两节点间的所有路段组成一条边(edge),若规定了该段道路的方向,则称为“弧(arc)”,弧内的路段和形状点均按顺序排列。边或弧是自动驾驶车辆路径规划的最小单元,路段是自动驾驶车辆导航路径优化的最小单元。
道路网络模型中的各要素如图3所示。其中,点A和点E为路口节 点,点B、C、D为形状点,线段AB、BC、CD、DE为路段,折线 ABCDE为边或弧。
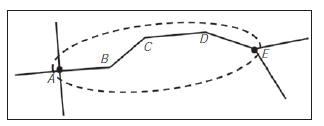
图3 路网数据各要素
路网数据包含的基本属性信息如下:
①点要素 节点、形状点。根据自动驾驶车辆导航中的路径规划要求,节点、形状点属性主要包括内容有:节点、形状点的编号,位置坐标;节点、形状点类型(道路的交叉口、立交桥的岔道口、高速公路的出入口、人为设定的起点、终点和途径点等);节点、形状点处的行驶限制(禁止掉头、禁止左转等)。
② 线要素 路段(边/弧)路段(边/弧)的特征属性信息通常包括几个方面:路段(边/弧)编号、道路宽度、车道数、所属道路名称及编号、车辆行驶方向。其中,路宽指的是一条道路上同向行驶的、无黄线分隔及物理隔离的相邻车道总宽度。这些数据为实现导航路径的优化和自动驾驶车辆路径引导提供了约束条件,也是本文地图模型中实现传统导航地图与自建地图的路网关联是否正确的判断依据;节点、形状点的编号,位置坐标;道路等级(高速公路、快速路、城市主干道、一般道路和街区道路)。严格区分路网数据的道路等级,对于路径规划的正确性、合理性等起着十分重要的作用,包括路面材质、最高车速、平均行车速度、收费状况及道路限制(禁止转弯、限行等)。
(2) 数据拓扑模型
构成路网的节点和路段除了具有自身的属性数据外,互相之间还存在着一定的拓扑关系,路径规划功能的实现就是建立在路网数据的拓扑关系上。因此,要在复杂的道路网络中进行最优路线的搜索和计算,必须将路网数据的拓扑关系按照一定结构进行合理的组织。
路网中的拓扑关系主要包括以下几个方面:
①节点与节点、路段与路段间的邻接性,即两个节点是否可以通过同一路段连接,以及两个或多个路段是否经过同一个节点。
② 节点与路段间的关联性,即某个节点是否处于某一路段上,或者某一路段是否经过某个节点。
③ 路段的方向性,即路段是否具有从一个节点指向另一个节点的明确的方向。图(Graph)是一种用来描述事物间某种特定关系的数据结构,由顶点集合、边集合和关联函数集合三部分构成,如图4所示。
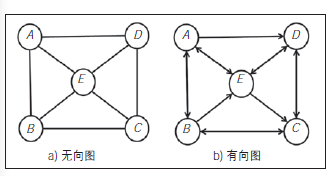
图4 无向图和有向图
导航地图中路网的拓扑关系可以很容易地用图进行表示。路网中的节点对应图的顶点,路网中的路段对应图的边或弧。
在真实的道路交通中,每条路都有行车方向的限定。一般的国道、省道、快速路和城市主干道等都是双向通行,但两个行驶方向间通常有隔离带或黄实线。也就是说,两个方向的道路之间不是直接连通的,实际上相当于两条单向通行的不同道路。在进行导航地图的路径规划过程中,为了防止规划路线与实际不符的情况发生,需要对同一道路的不同行驶方向进行区分。因此,路网应使用有向图表示。
在对最优导航路径进行搜索与计算时,通常要对车辆行驶的距离、消耗的时间、道路的拥堵程度、收费情况、路面状况及道路等级等多项指标进行综合评判,各项指标的权重不同,对规划结果也会产生影响。因此,路网应使用带权图表示。如图5所示,真实环境中的一条道路因为行车方向的限制被抽象为两条方向相反的道路,十字路口被抽象为4个节点及其相邻的路段,线条的粗细表示路段的权重。
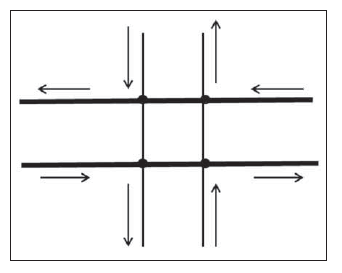
图 5 路网模型抽象后的道路和路口
总结
传统汽车导航的“受众”是人,而自动驾驶车辆导航的“受众”是计算机,后者需要导航路径有更高的连续性与精准性,要求路径上的位置点分布均匀细密且坐标足够精确。现有传统的导航电子地图和自建高精度地图用于自动驾驶车辆导航时都存在各自的优势和不足。因此,任何一类地图在独自应用时都无法很好地完成自动驾驶车辆导航的任务。针对以上问题,将这两类地图进行结合,构建适合自动驾驶车辆导航的电子地图模型,便于为自动驾驶车辆的行驶路径进行全局规划,并提取规划路径上的路网节点数据。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论