车载毫米波雷达的原理和应用技术
引言
毫米波雷达作为汽车主动安全领域关键传感器部件,可有效穿透雾、烟、灰尘,实现全天时、全天候工作负荷要求。目前市场上多以 24GHz 和 77GHz 毫米波雷达产品为主,汽车辅助驾驶系统安装毫米波雷达近年来快速增加,主要产品有车载自适应巡航装置(ACC)、前端碰撞预警系统(FCW)、辅助变道系统(LCA)、自动跟车系统(S&G)、车尾端盲区探测装置(BSD)、侧向探测系统(CTA)等车载应用毫米雷达。车载雷达通过对目标大小、速度(相对)、距离、角度、数量等参数进行测量、计算、分析、显示、预警、自动控制等操作。随着汽车市场的日益开拓,车载毫米波雷达技术测量精度更高,数据处理时间更短,探测目标更密集且搜索预警半径更大,安全可靠性更高端。而且随着技术不断成熟,车载毫米波雷达生产成本更加低廉,将能够满足无人驾驶雷达系统需求 [1]。
1 车载毫米雷达应用市场分析
随着ADAS市场渗透率加速提升,车载毫米波雷达一些关键部件需求量逐年递增。而目前我国车载雷达核心配件市场多依赖进口,国内自主车载毫米波雷达产品以 24GHz、77GHz为主。据世界专业预测机构分析,明年我国ADAS市场30%渗透率进行估算,每套ADAS配备4个短距和1个长距毫米波雷达计算,则整个车载毫米波雷达市场需求总量会达7200万个,中国汽车毫米波雷达行业的产值会达到400 亿元人民币,目前,中国已经成为全球最大的汽车消费市场。
2 车载毫米雷达技术分析
2.1 车载毫米雷达频段
毫米雷达毫米波为电磁波,其波长介于1-10mm,具有抗干扰强、波长短、窄波束易实现、频段宽、动态分辨率高等优点。毫米雷达波应用集中在汽车电子、无人机、军事雷达监测、智慧医疗、交通、家居等领域。世界很多国家在频率应用上多对车载毫米波雷达分配在 24GHz 和77GHz 频段,日本等少数国家则采用 60GHz 频段。由于77GHz频段的部件体积小、天线尺寸短,容易实现单芯片集成结构,具备更高的速度分辨率、信噪比和输出功率,有利于减少成本等有点,未来全球车载毫米波雷达的频段将选择 76-81GHz 频段。
2.2 车载毫米波雷达原理
车载毫米波雷达原理在于内置雷达信号接收模块和发射模块,通过内置天线向外发射毫米波信号,信号遇到目标后反射回波,雷达系统接受模块及时接收反射回波后,对信号进行 FFT 处理、解析,从而获得精度极高的周围目标物体间的相对速度、相对距离、角度、运动方向等物理环境信息,计算机系统对这些信息进行识别、分类以及实施目标追踪、安全控制等,信息处理单元与自己车辆行驶信息匹配后,经过混频、滤波后把数据进行融合处理,最后车载中央处理单元(ECU)进行行驶信息的决策,同时通过语音、灯光等方式对驾驶员进行提醒、警告,或者自主进行安全操作干预,提高了驾驶的安全性能,避免事故发生。
2.3 车载雷达收发调频体制
收发调频体制是车载雷达频率工作的核心部件,其设计好坏直接影响雷达的性能。其影响着雷达目标分辨率、测速、测距、测向范围、测量精度、自动识别的模糊度等重要指标。由于雷达辐射电磁波的方式多样,因此,车载毫米波雷达可分为两种工作体制:连续波和脉冲波。连续波又有频移键控(FSK)、相移键控(PSK)、恒频连续波(CW)、线性调频连续波(LFMCW)、调频连续波 (FMCW)、等形式。
车载 FMCW 雷达系统具有分辨率较高、可测量多个目标、信号处理快、成本低廉等优势应用较为广泛,其构成主要有收发天线(PCB板)、射频前端、调制信号单元、信号处理模块(ECU)混频单元、滤波单元等[2]。下面重点介绍集中波形及处理方式。
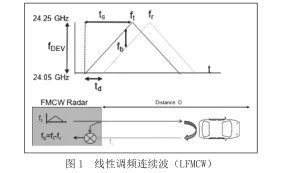
(1)可变斜率连续波(CVS)由线性调频连续波(LFMCW)技术演变发展形成。CVS 可自动识别虚假目标,并自动排除,图1为 LFMCW 波形,LFMCW利用波形的上升沿同下降沿间的频率差对单个目标距离、速度进行描述。多目标跟踪状态时,N个目标差拍频率组合方式为N2 种,而虚假目标会有 N2-N 个
(2)多频移键控雷达波(MFSK)由频移键控波(FSK)与线性调制频率连续波(LFMCW)合并生成。发射波形主要有 2 个线性调制和交叉的阶梯上升信号,参考信号为序列 1 信号,序列 2 信号参考信号存在一定的频率差。其工作过程为接收信号在混频模块中的下混频器处理后作为一个基带信号,采样信号为基带信号在每个频率阶梯上采样获得。然后对基带信号中的序列 1、序列 2 进行快速傅里叶变换和 CFAR 处理,然后对频率差和一个周期内的相位差进行解析,获取监测目标的距离、速度等有用信息。MFSK 同 LFMCW 进行比较分析,MFSK 增加了相位差信息的处理,其计算精度略低于 LFMCW。
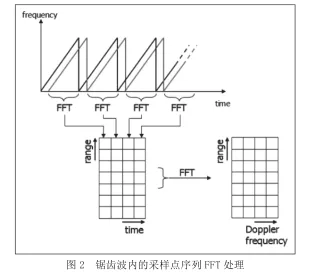
(3)快斜波序列雷达(FRCS)。其原理为雷达处理系统内的发射模块在TCPI时间段内连续向外发射N个锯齿波(斜率较大),每个锯齿波时间为T。由于锯齿波斜率大,持续时间 T 较小,可以忽略多普勒频移效应,锯齿波之间形成的频率差fB 由雷达信号传输时间变化值 fτ 决定。
实际应用中,每个锯齿波内采样点序列进行傅里叶变换处理,检测差拍频率fB后对目标距离进行分析估算。相对速度检测是通过 TCPI 内锯齿波综合的 FFT 变换处理后,进行二维傅里叶变换,求出多普勒频移fd后计算出与目标的相对速度,并利用计算的相对速度校正一维 FFT 目标距离估算结果的验证。二维FFT有助于提高系统的信噪比,简化后续检测算法,从而提高计算精度和测量精度 [3]。
2.4 车载雷达技术应用
雷达调制锁相环芯片 ADF4158/4159 芯片与收发MMIC芯片 ADF5901 和 ADF5904 结合,可以实现车载雷达多种调频体制和基带算法,并对基带带宽、调频步数、波形、delay 等等参数进行合理配置,满足精准频率控制需要。
由于 MIMO 技术的成熟,并开始应用于测在雷达系统,信号信道数量增加而且更加宽阔,信号处理于传输性能更加便捷,MMIC芯片多收多发能力更加强大。ADF5901、ADF5904芯片目前可以支持 2 发射 4 接收通道的信号传递。采用数字波束成型(DBF)技术,强化并改善了信号的滤波功能,能够满足高精度角度测量的需求;车载系统控制单元DSP技术也日益成熟,目前车载DSP主频为400MHz 主频,内部 SRAM 达到1MB,支持外扩 DDR2 存储器。为满足 FFT 多维运算,不断优化硬件计算处理能力,同时利用软件技术实现了高精度算法模型及数据进行芯片 ROM 固化处理,实现高层次需求的雷达算法 [4]。
3 结论
基于车载微波雷达技术的应用,增强了汽车行驶安全,并给驾乘人员提供更加舒适的操控体验。通过对车载毫米雷达市场应用和原理分析,详细介绍了雷达波形以及调制机制,系统工作稳定,应用场景广泛,确保了行车安全。满足了汽车操控舒适性要求。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论