电动卡车下坡行车辅助制动系统设计
1 引言
大型车量特别是重型卡车和大型客车在山区公路遇到连续长坡时需进行连续长时间制动。这需要车辆制动系统处在连续工作状态。刹车系统产生的热量难以快速散出,因而会因为制动系统温度升高是的制动系统出现热衰退,制动效果减弱甚至失效。对此国标 GB12676- 2014《商用车辆和挂车制动系统技术要求及试验方法》要求重型载货车辆及大型客车必须加装辅助制动系统以提升车辆的安全性和经济性。
2 下坡行车辅助制动系统
下坡行车辅助制动系统是在车辆处于连续下坡状态时,在不踩制动踏板的情况下为车辆提供持续的可靠的制动力以保证车辆匀速稳定运行的系统。目前技术比较成熟,使用比较广泛的辅助制动装置主要有发动机制动 / 排气制动,电磁涡电流缓行器,永磁铁涡电流缓行器,液力缓行器,驱动电机反拖制动等。
传统汽车在制动过程中其机械能大部分通过制动器的摩擦转化为热能消耗掉。电动汽车采用电机作为驱动部件,可以利用电机的制动发电来回收制动能量。对于电动机驱动的车辆可以通过让电动机工作在能量回馈的状态为车辆提供制动力,同时向车辆的动力电池充电。对于电力驱动的车辆,此方式是最常用的辅助制动系统。
3 动力学模型
国标 GB12676- 2014 提出对能量只由发动机(或电动机)制动作用吸收的车辆,应可以在选择适当的档位时只通过辅助制动系统制动时保证车辆可以在 6%的坡道上以最接近 30km/h 的稳定车速下坡行驶,允许平均车速有±5km/h 的偏差。对车辆系统做动力学分析,车辆受重力 G,斜坡面承托力 F0,地面摩擦力 F1,风阻 F2,如图 1 所示。
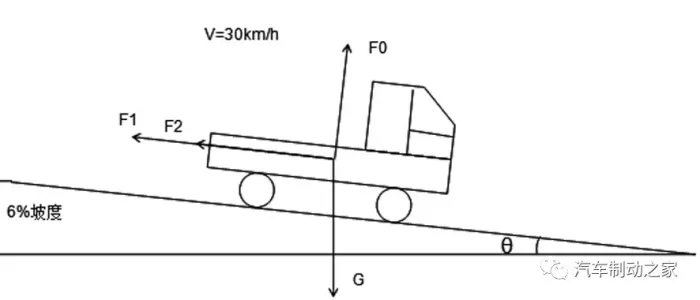
根据牛顿第一定律车辆模型所受各力应满足如下关系:
将式(3)—(6)带入式(1)、式(2)计算得到变速箱轴处输出扭矩为 675N,车速 30km/h 时对应变速箱输出轴转速为 1064rpm;对应的各档位电机的输出转矩与转速参照表 2。向能量再生(Reverse Regeneration,RR)状态。假设现在电机运行在转速为ωm 的稳态下,将电机工作状态有电动状态切换至发电状态则能量由电机向电源反向流动,这种运行模式被称为再生制动[2]。该制动过程是通过能量再生实现的,即通过电机产生反向转矩,此时电机工作在第 IV 象限。电机能持续提供的扭矩称为额定容量,短时提供的峰值转矩称为短时容量。
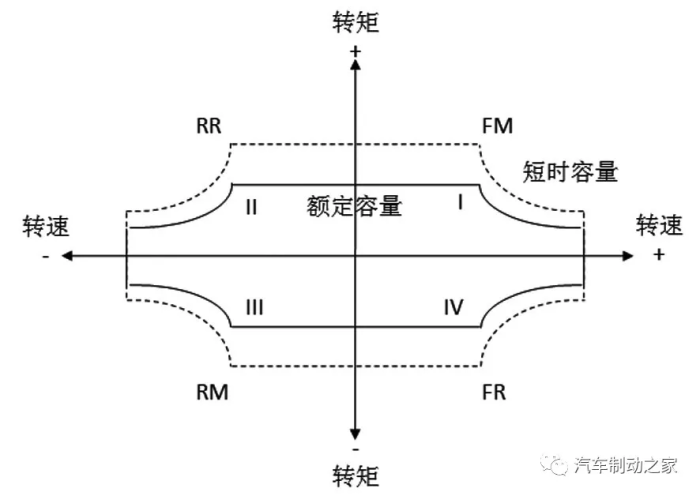
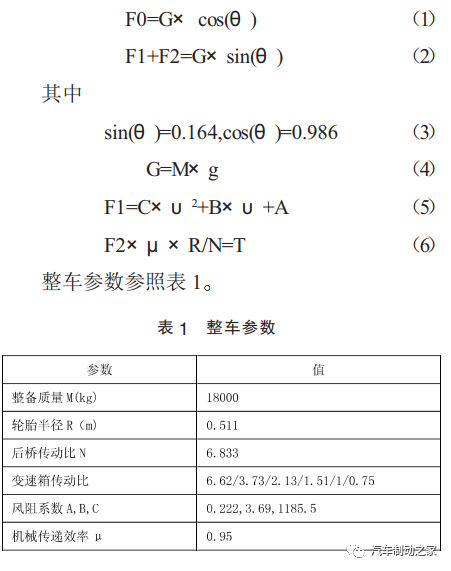
图2 四象限转矩-转速特性曲线
目标车辆所使用的电机转速特性参见图 3,图中的 M点位车辆在 6%坡道上 30km 每小时的各档位工况点。可知在二档,三档可满足车辆持续制动需求。
表2 各档位工况

4 电机反拖制动力分析
广泛使用在新能源车辆上的永磁同步电机通常具备正向反向双向运转能力即具备四象限工况运行能力,如图 2 所示。第 I,IV 象限具有相同的转向即正向驱动(Forward Motoring,FM)和正向能量再生(Forward Regeneration,FR)两种状态。车辆工作时电机需要正反两种转向。第 III 象限成为反向驱动(Revese Motoring, RM)状态,第 II 象限被称为反 (下转第12页) 12 技术纵横 轻型汽车技术 2019(3)
图3驱动电机特性曲线
5 控制策略
由上文计算可知电机持续回馈制动提供的制动力能够满足车辆的制动需求,本节提出一种控制策略使车辆在回馈制动的工作模式时可以控制车速稳定在 30km/s 匀速运行。
为了利用电机回馈制动作为车辆的辅助制动系统,驾驶员在连续下坡时应将车辆切换至手动模式。在一档时油门踏板完全松开的时候输出额定能量回馈扭矩大于车辆匀速运行所需的制动力,驾驶员可通过踩踏油门踏板减弱能量回馈扭矩来控制车辆减速或加速,当电机转速增加至换挡转速点时手动切换档位至二档,再通过油门踏板控制电机转速,当电机转速增加至换挡转速点时手动切换至三档。如此,则可使车辆稳定在 30km/s 的状态匀速运行。
6 结语
电动汽车受制于电池技术,续航里程一直是电动汽车关注的焦点,因此使用电机能量回馈模式作为辅助制动具有重要意义。本文通过理论计算研究可知,由通过单独的电机能量回馈制动作为辅助制动系统能够满足国标 GB12676- 2014 对车辆辅助制动系统的要求。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论