L4级自动驾驶系统的技术趋势及难点
美国汽车工程师协会(SAE)根据系统对于车辆操控任务的把控程度,将自动驾驶技术分为L0-L5,系统在L1~L3级主要起辅助功能;当到达L4级,车辆驾驶将全部交给系统,而L4、L5的区别在于特定场景和全场景应用。当前已有一部分国内主机厂在规划量产了L3级自动驾驶功能,当然真正的L3级要获得认可就必须考虑其是否获得政府机关发送的准入牌照。这里需要说明的是L3级作为一种实际上的人机共驾系统,在很多设计场景中仍然需要依靠驾驶员对系统的有效接管,而从L4级自动驾驶系统将开始实现对驾驶员的完全替代。L4级自动驾驶将是让汽车自己完全拥有环境感知、路径规划并且自主实现车辆控制的技术,也就是用电子技术控制汽车进行仿人驾驶或是自动驾驶。

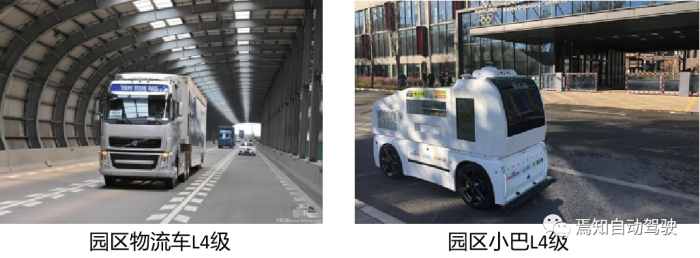
L4级自动驾驶系统在真正的实际应用中,还存在着相当多的问题项,比如后续将如何具体区分L3与L4级自动驾驶系统,L4级系统升级的本质在哪里?升级后的L4自动驾驶系统对高精地图定位和建图有何特殊需求?当前已有一些园区内车型(如大型物流车、中转小巴等)已实现了局部L4级功能,那么他们相对于乘用车之间的区别在哪里?后续L4级如何实现城市道路自动驾驶?如何真正意义上的确保驾驶安全性?如上这一系列问题都是值得我们深刻探究的问题。
本文将着重挑选几个方面进行详细讲解。
L4级自动驾驶系统升级本质说明
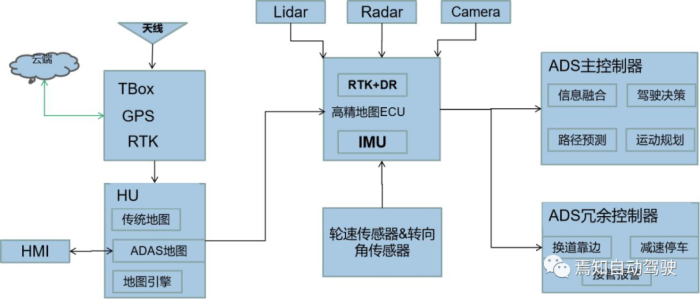
如上所述,对于L4级以上的自动驾驶系统而言,其驾驶任务已经得到很明确的区分,对于驾驶环境仍旧定义了设计运行范围ODD,要求系统在其ODD内部的所有驾驶任务都由系统承担,且系统需要处理驾驶过程中可能出现的所有突发状况。为此,从L2到L3再到L4级的系统需求上将从本质上发生变化,具体主要有如下一些不同的驾驶策略升级。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-
如公交车要求地图能够准确实时的提供在城市道路的车辆环境信息,其更关注在拥堵和复杂交通流下的信息探测(如十字路口); -
矿车、货车一类的大型车主要用于物流运输,则更多的是关注在高速路或快速路下的道路情况(如前方是否施工等);
如大货车由于其自身高度较高,更关注路上的限高这一因素;
不同车型的限速要求不同,大型汽车限速条件更为严苛,则更加关注发出路径上的限速信息;
另外根据不同车型(如大货车有专用车道,小汽车无专用车道),其对车道级限速要求比较严苛,这也是对交通事故判定打下基础;

针对某些重型货车,其车身长度较长,则更关注弯道曲率,过大的弯道曲率可能导致无法正常过弯;
针对不同载重的货车,其对道路最大横坡纵坡容忍度也有差异,过大的坡度可能导致无法正常行驶;

高精地图需针对不同车辆类型建立不同的场景采集分配比重,以各车型均关注的道路场景建立“基础纵包”,以各不同车型单独关注的道路场景增添到基础众包中;
各种车型由于其反应能力不同,对高精地图发出的相同信息的精度要求也不一样,在高精地图建图性能匹配时,需要充分考虑满足其精度性能的实现方案;
各种不同车型由于其反应能力不同,对高精地图发出信号周期也不相同,故需要针对每一款不同的车型单独提出需求来满足信号输入条件。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论