一文读懂激光雷达:让小鹏、极狐争先搭载的黑科技厉害在哪?
在这届上海车展,激光雷达成了炙手可热的技术明星。这项技术很多年之前就被寄予厚望,而时至今日终于在汽车领域来到了量产阶段。这次车展小鹏P5抢到了“全球首款量产激光雷达智能汽车”的称号,而极狐阿尔法S HI版、WEY摩卡、蔚来ET7、智己L7 都发布了搭载激光雷达车型,新的阶段已经到来,这个之前被马斯克嗤之以鼻的自动驾驶感知方案厉害在哪?它比起纯视觉感知方案又怎么样?

激光雷达(英文:Laser Radar),它是以发射激光束探测目标的位置、速度等特征量的雷达系统。它就相当于我们的眼睛,具有很强大复杂的信息感知和处理能力。

从构成上看,激光雷达由激光,全球定位系统(GPS)和惯性导航系统(INS)三种技术于一身,用于获得数据并生成精确的DEM(数字高程模型);从工作逻辑看,激光雷达由发射系统、接收系统和信息处理系统组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到显示器。
其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后就可获得目标的有关信息:如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对目标进行探测、跟踪和识别。

激光雷达应用场景极其丰富,早在很多年前就被广泛应用在飞机避障、侦查成像、导弹制导等领域,但由于近些年机器人和无人技术的兴起,才逐渐被大家所熟知。单就民用领域,目前就有机器人、无人车、无人机、AR/VR、3D打印等等应用,本文着重说无人车领域。

激光雷达在汽车领域主要应用于自动驾驶,也就是未来的无人驾驶。而目前仅为自动驾驶辅助应用。和机器人领域一些产品的单线束不同,激光雷达在汽车上主要以多线束为主,作用是帮助汽车自主感知道路环境,自动规划行车路线,并控制车辆到达预定的目标。
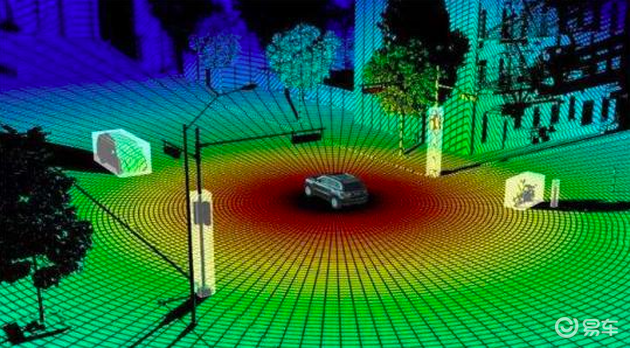
激光雷达如何帮助汽车识别路口与方向?它是根据激光遇到障碍物后的折返时间,计算目标与自己的相对距离。激光光束可以准确测量视场中物体轮廓边沿与设备间的相对距离,这些轮廓信息组成所谓的点云并绘制出3D环境地图,精度可达到厘米级别,从而提高测量精度。

1.分辨率高
激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此和微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率。
2.抗干扰能力强
激光波长短,可发射发散角非常小的激光束,多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可探测低空或超低空目标。
3.不受光线影响
激光雷达可全天候进行侦测任务,它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。
4.体积小、质量轻
通常普通微波雷达的体积庞大,而激光雷达就要轻便、灵巧得多,外观只有厘米级。而且激光雷达的结构相对简单,维修方便,操纵更容易。

目前应用在智能汽车上的自动驾驶感知方案中分为两大流派,一个是纯视觉系,就是以摄像头画面为主辅以毫米波雷达的方案,另一派就是加入激光雷达的方案。一方面是马斯克和它的特斯拉的嫌弃,号称“激光雷达免费都不用”;另一方面是华为蔚来等企业相继加码布局。那么这三个自动驾驶感知的主要功能部件都分别起到什么作用,它们之间的区别又在哪?

高清摄像头:车辆上最简单且最接近人眼成像原理的传感器。通过对车辆周围环境实时拍摄,并采用CV技术对所拍摄的图像进行分析,可以实现车辆周围的车辆及行人检测,交通标志和信号灯识别等功能。
不过其在夜晚、雨雪雾霾等恶劣天气下摄像头的性能会迅速下降;此外摄像头所能观察的距离有限,单凭摄像头无法准确得知远距离处的环境信息;摄像头的所拍摄的图像为2D的,若要建立3D模型效果难以保证。

毫米波雷达:毫米波雷达工作原理和激光雷达类似,也是通过收发信号通过时间差测距,但它的探测精度和范围有限,因此主要做主动安全防御功能使用:比如盲点监测、泊车辅助、自适应巡航等等。

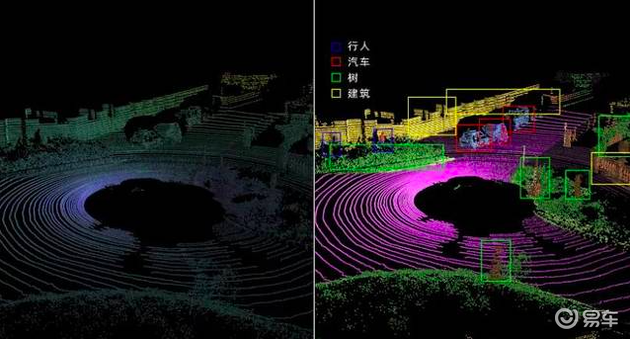
激光雷达:其最主要的特点在于能够建立三维环境模型,对周围环境信息的分类识别能力强大很多。纯靠摄像头+毫米波雷达的方案对于信息感知能力相对较弱,目前应对L2+级辅助驾驶还能堪当重任,如果来到更高阶的辅助驾驶甚至最终的全自动驾驶层面,信息的局限性会大大影响无人车辆的识别处理执行能力。举个简单的例子,特斯拉无法识别白色大卡车的频发案例,就是因为这套方案对静止车辆识别能力的局限性。
当然激光雷达也有自身劣势,比如在恶劣天气下识别能力相对较差,还需要毫米波雷达的辅助,因此现阶段自动驾驶方案中这三者都是重要感知部件,它们互相组合能实现当下最好的效果。

从最近公布信息的小鹏P5、WEY摩卡、极狐阿尔法S HI版等车型的宣传内容看,关于激光雷达的宣传点有很多信息点让不太了解这个技术的朋友看得云里雾里,只是不明觉厉:固态激光雷达、100线高分辨、140°大视野水平FOV...这些专业名词都是什么意思?下面就带大家简单了解一下。
其实激光雷达涉及的参数有很多:激光波长、探测距离、FOV(垂直+水平)、测距精度、角分辨率、出点数、线束、安全等级、输出参数、IP防护等级、功率、供电电压、激光发射方式、使用寿命等。咱们就找几个直观典型的参数给大家解释下。
1、探测距离:
激光雷达能够探测的范围,它的测距能力与被测物体的反射率相关。反射率就是射到目标物的激光能够被反射回来的比率,目标反射率越高,雷达能够检测到的有效回波就越多,所以能测量的距离越远。因此探测距离一般和反射率一起出现,比如150米@10%,就是指在目标反射率为10%的情况下探测距离为150米,但一般车企宣传中只有距离没有反射率参数。
2、探测精度:
探测距离的精确度,一般以cm为计算单位,探测精度越高,3D景深刻画的越准。
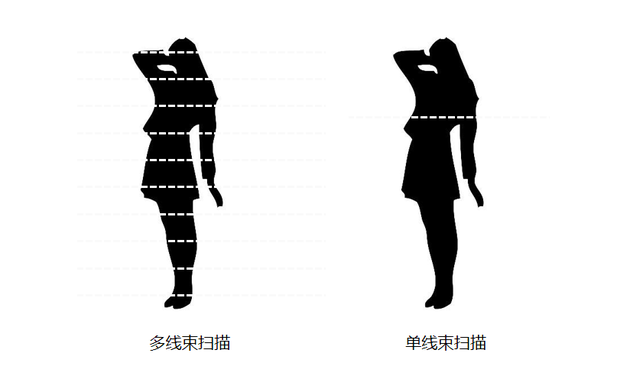
3、线束:
激光雷达分为单线束和多线束,单线束激光雷达只有一个激光发射器,随着雷达转动形成一条水平扫描线,所以只能检测前方有没有障碍物;多线激光雷达在垂直方向有多个激光发射器,随着雷达转动形成多条水平扫描线,这样就能够扫描一个平面。线束越多对目标物成像越详细,相应的价格也越昂贵,车企宣称的32线、64线、100线说的就是这个意思。
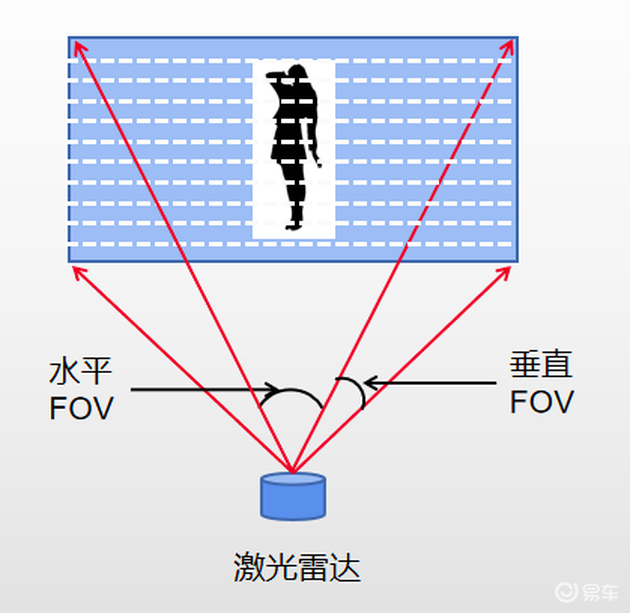
4.FOV(视场角):
视场角越大,视野范围越广,就像车灯打开照亮的那片范围一样。它包括水平和垂直两个方向,从水平角度看,机械式激光雷达能够360°旋转,所以水平FOV是360°。固态激光雷达的水平FOV会小一些。水平FOV越大,能够探测的范围越广。
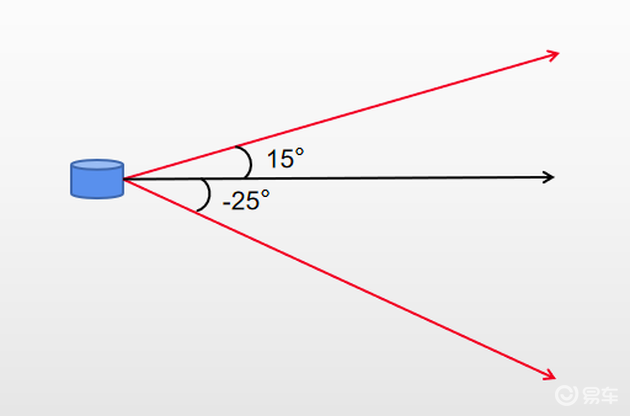
垂直FOV只对多线束激光雷达有用,指最上面一束激光和最下面一束激光形成的夹角。垂直FOV的视野一般偏向地下一些,比如水平为0°,那么向上15°,向下25°,这样垂直FOV就是40°,这样的好处是能够让车辆更多的探测到地面车辆和行人。
5.角分辨率:
角分辨率指成像系统的分辨精度,它和FOV一样也分为水平和垂直两个方向。水平分辨率指左右两个扫描的激光点形成的夹角;由于激光雷达旋转,而激光发射器是脉冲,所以射到目标物上面的是一个一个点。
激光脉冲是固定频率的,所以水平方向的分辨率只和雷达旋转速度有关,只要速度足够慢,分辨率就可以很高,现在做到0.01°也是很正常。但是扫描速度慢也会影响信息采集的速率。所以水平分辨率要和确定的扫描速度对应,扫描速度一般用频率来表示,即1秒扫描来回扫描多少次。
垂直分辨率是指上下两个线束形成的激光点的夹角。线束在垂直方向上不是均匀分布的,而是中间密集,上下稀疏,因为中间更有可能探测到行人或者是障碍物。
6.出点数:
也叫周期采集点数,举个例子,一个64线的激光雷达,水平FOV是120°,水平分辨率在10Hz的扫描频率下是0.2°,激光一次打出64个点,扫描一次120°能打出64x120/0.2=38400,1秒扫描10次,一共有384000 pts/s。出点数越多,扫描的效果越好。

车载激光雷达市场目前仍是百花齐放,类型基本是三类:机械式激光雷达、半固态式激光雷达、固态式激光雷达,这三者从趋势上看是递进关系,最终有向固态发展的趋势;而目前发展基本上分为两个阵营,一种是像Uber、Waymo这样的自动驾驶公司,它们为了探索高阶段自动驾驶发展,必须依赖到更高精度的传感器,性能优先的原则让它们选择多线束机械式激光雷达,但离量产还很远,它的成本和稳定性都不能满足。

极狐阿尔法S HI版
另一种就是这次车展的主流了,就是准备落地到量产车上的激光雷达产品。要满足落地量产车,是要满足3个条件的:车规级、可量产、成本可控。因此稳定性差成本高居不下的机械雷达就不适用了,半固态和纯固态激光雷达走向了舞台中央。
 像极狐阿尔法S HI版搭载的就是华为3颗96线固态激光雷达,小鹏P5搭载的是大疆Livox的2颗等效144线激光雷达,WEY 摩卡搭载lbeo的3颗全固态激光雷达等等都是如此,半固态和固态激光雷达的成本非常可控,体积小、稳定性高,虽然也存在着技术突破慢的困境,但对于当前的自动驾驶水准来说是最好的选择。未来行业整体向着“低成本化”、“量产化”、“固态化”、“智能化”发展,激光雷达的自动驾驶感知方案也将成为主流。
像极狐阿尔法S HI版搭载的就是华为3颗96线固态激光雷达,小鹏P5搭载的是大疆Livox的2颗等效144线激光雷达,WEY 摩卡搭载lbeo的3颗全固态激光雷达等等都是如此,半固态和固态激光雷达的成本非常可控,体积小、稳定性高,虽然也存在着技术突破慢的困境,但对于当前的自动驾驶水准来说是最好的选择。未来行业整体向着“低成本化”、“量产化”、“固态化”、“智能化”发展,激光雷达的自动驾驶感知方案也将成为主流。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论