自动驾驶虚拟仿真技术(二):仿真测试场景设计
一、场景对自动驾驶仿真的意义
所谓场景是车辆与交通环境中其他车辆、设施、环境、道路等元素综合交互的过程,各个场景元素组合得到不同场景的集合,自动驾驶测试场景本质上就是对所有相关场景元素的一种提炼。

图 1 自动驾驶仿真场景
对于自动驾驶测试来说,不论是仿真测试还是场地测试,目前普遍采用的都是基于场景的功能测试方法。其好处在于可以弥补基于里程的测试方法的局限性,在提高系统开发效率、产品落地效率方面都有重要作用。
测试场景的全面性会影响到测试的覆盖率,测试场景质量的高低会影响到测试效率以及测试结果的有效性,测试场景的合理性会影响到测试结果的真实性。
二、场景设计数据来源
自动驾驶场景设计数据主要有以下五种来源:

图 2 场景设计数据来源
1、自然驾驶数据场景
主要来源于通过设备采集的由人类驾驶车辆产生的数据生成的场景,包括驾驶场景数据库中的场景以及企业的道路测试场景。
2、危险工况场景
主要包括恶劣天气环境、复杂道路交通以及典型交通事故场景:
-
恶劣天气环境:大雨、大雾、大雪、雾霾、强烈逆光等可能使自动驾驶传感器功能受限的环境,以及结冰、积雪、横风等可能影响自动驾驶系统操纵控制的环境; -
复杂道路交通:包括多车道选择、环岛、交通拥堵、多层立体交通枢纽等; -
典型交通事故场景:各类交通事故真实场景。
3、法规场景
标准法规测试场景是自动驾驶功能在研发和认证阶段需要满足的基本场景,国内外的ISO、GB/T、NHTSA、NCAP、i-VISTA、C-IASI中都有标准测试场景。
4、设计场景
由自动驾驶开发企业根据所开发系统的特性自行设计的场景。
5、重构场景
即将仿真场景模块化,将一个仿真场景分解多个模块,通过各个模块参数在符合场景逻辑的排列组合随机生成或自动重组,进而补充大量未知工况的测试场景,有效覆盖自动驾驶功能测试盲区。
三、场景设计要素
目前行业主要依据德国PEGASUS项目提出的场景六层模型来进行场景要素分类。
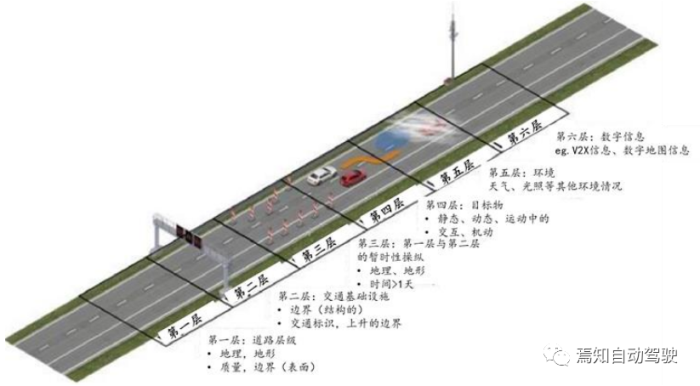
图 3 PEGASUS六层模型
四、场景设计方法
同样参考 PEGASUS,仿真场景构建主要分为三个阶段,分别为功能场景(Functional scenarios)、逻辑场景(Logical scenarios)和具体场景(Concrete scenarios):
-
功能场景
-
逻辑场景
-
具体场景
下表1为一个场景设计示例:
表 1 向左变道场景
场景构建阶段 |
要求 |
示例 |
功能场景 |
融合道路信息、本车信息、交通参与者信息、环境信息,以文字的形式将功能场景进行具体描述 |
n道路类型-四车道快速路 n道路几何-直线道路 n本车-最右侧车道,本车道行驶 n前车-最右侧车道,本车车前,向左变道 n环境条件:白天,晴天 |
逻辑场景 |
对功能场景包含信息变量化,并赋予相应的参数值空间范围 |
n道路类型:四车道快速路,2.5m~3.75m n本车:纵向速度:70~90km/h n前车:在本车前方(100m~200m) n向左变道(纵向速度:70~90km/h,横向加速度:1~2m/s²) n环境条件:晴天,白天(光照>1000lux) |
具体场景(测试用例) |
定义场景变量具体的参数值 |
n道路类型:四车道快速路, 3m n本车:纵向速度:70km/h n前车:在本车前方(200m) n向左变道(纵向速度:70km/h,横向加速度:2m/s²) n环境条件:晴天,白天(光照:2000lux) |












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论