汽车动态底盘控制系统多模式垂向控制及实车验证
摘 要
为探明汽车动态底盘控制系统控制作用机理,研究其多种模式下的垂向控制策略并进行实车道路对比验证。建立半主动悬架1/4车辆模型,研究经典天棚和地棚控制算法,并在此基础上提出改进天棚控制策略,将其分别实施于动态底盘控制系统的舒适、运动和标准3种模式。仿真和实车验证结果表明:自主研发控制器的控制效果明显优于被动减振器和原车控制器,其中在标准模式下,与原车控制器相比,驾驶员座椅面和后排座椅面的加权加速度均方根值分别减小8.93%和11.79%。因此所提出的控制方案能够满足动态底盘控制系统多种模式可调的需求,为实际工程应用提供了参考。
关键词 动态底盘控制系统; 改进天棚; 垂向控制; 实车验证
动态底盘控制(dynamic chassis control,DCC)系统亦称自适应底盘控制系统,能够针对路面行驶工况和驾驶员需求实现4个阻尼连续可调半主动悬架阻尼力的自适应可变调整,将汽车底盘调节成舒适、标准和运动3种模式,有效平衡汽车操稳性与舒适性技术难题,但目前中国对此系统尤其是控制策略缺乏足够了解。
许多学者对半主动悬架控制方法开展了大量研究,主要有天棚控制[1]、最优控制[2]、滑模控制[3]、自适应控制[4]、模糊控制[5]、分数阶控制[6]和模型预测控制[7]等。文献[8-9]开展了阻尼可调半主动悬架的台架和实车道路试验。总体来言,现有研究多偏向理论,缺乏工程应用,尤其是针对多种模式可调的DCC系统,并未提出明确可行的控制策略,以及进行相应的实车验证。为此,在研究经典天棚和地棚控制的基础上,提出改进天棚控制策略,将其分别实施于DCC系统舒适、运动和标准3种模式的控制,自主完成DCC控制器的开发、匹配和标定,进行整车级的道路实车对比验证,为DCC系统国产化提供参考。
1 半主动悬架1/4车辆建模
图1为1/4车辆模型。图1(a)为被动悬架,悬架刚度ks和阻尼系数cs为定值;图1(b)为装有阻尼可调减振器的半主动悬架,ud为减振器可控阻尼力,能够根据实际行驶路况连续可调。
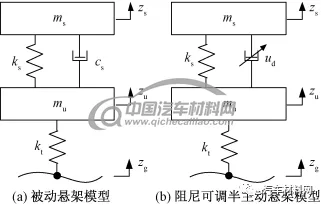
ms为簧上质量;mu为簧下质量;ks为弹簧刚度;cs为被动悬架阻尼系数;kt为轮胎垂向刚度;zs、zu和zg分别为簧上质量、簧下质量和路面输入的垂向位移
图1 1/4车辆模型为便于后述控制策略描述,建立阻尼可调半主动悬架动力学方程如式(1)所示:
(1)式(1)中:
 控制量
控制量 分别为簧上质量和簧下质量的垂向速度;
分别为簧上质量和簧下质量的垂向速度; 为簧上质量垂向加速度;A、B、C、M和N为系数矩阵。
为簧上质量垂向加速度;A、B、C、M和N为系数矩阵。
2 多模式垂向控制策略设计
针对DCC系统的3种不同的模式需求,采用3种不同的垂向控制策略,如图2所示。
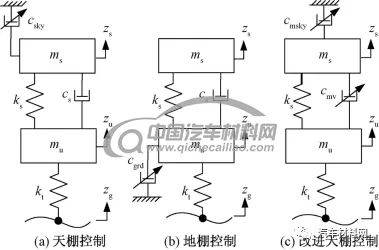
csky为理想天棚阻尼系数;cgrd为地棚阻尼系数;
cmsky为对应天棚阻尼系数;cmv为可变阻尼虚拟系数
2.1 天棚控制策略
天棚控制最早由Karnopp提出[1],用于提升乘坐舒适性。之所以称为天棚控制,是因为汽车簧上质量与惯性参考系之间具有天棚阻尼力,如图2(a)所示,理想天棚阻尼力为

(2)式(2)中,Fd,sky为理想天棚阻尼力;csky为理想天棚阻尼系数,csky>0。
实际应用中,理想天棚阻尼力Fd,sky难以实现,需要通过控制实际减振器的阻尼特性来模拟天棚控制效果,根据悬架相对运动速度 与车身绝对速度
与车身绝对速度 的符号关系来切换阻尼设置,实际天棚控制力为
的符号关系来切换阻尼设置,实际天棚控制力为
(3)式(3)中,ud,sky为实际天棚控制力;Fd,max和Fd,min分别为实际减振器最大作用力和最小作用力。
2.2 地棚控制策略
地棚控制与天棚控制相反,主要是控制轮胎垂向动载荷,提高车辆操稳性[10],如图2(b)所示,理想的地棚阻尼力为
(4)式(4)中:Fd,grd为理想地棚阻尼力;cgrd为地棚阻尼系数,cgrd>0。
同样,理想地棚阻尼力Fd,grd也难以实现,需要通过控制实际减振器的阻尼特性来模拟地棚控制效果,实际地棚控制力为
(5)式(5)中:ud,grd为实际地棚控制力。
2.3 改进天棚控制策略
天棚控制作以提升车辆的平顺性为主,但会影响车辆操纵稳定性,而地棚控制主要用于控制轮胎动载荷,忽略了车辆平顺性。为了改善由天棚控制导致的车轮动载恶化,提出改进天棚控制策略[11],如图2(c)所示,理想的改进天棚阻尼力为

(6)式(6)中:Fd,msky为理想的改进天棚阻尼力;cmsky和cmv分别为对应天棚阻尼系数和可变阻尼虚拟系数,且满足cmsky>0、cmv>0。
为了得到改进天棚阻尼系统cmsky和cmv,首先基于全局最优的线性二次型调节器(LQR)方法得到对应主动悬架的最优主动阻尼力,然后通过最小化改进天棚控制阻尼力和LQR最优阻尼力之间的差值,得到改进天棚阻尼系数。
定义综合描述车辆平顺性和操稳性的性能指标:
J=

wt(zu-zg)2+ru2]dt
(7)式(7)中:T为积分时间;t表示对时间积分;wa、ws、wt分别为车身垂向振动加速度、悬架动行程和轮胎动位移的加权系数;r为控制输入加权系数,用于限制控制量的抖动。
根据状态方程[式(1)],性能指标如式(8)所示:

(8)式(8)中:W=diag[wa,ws,wt];Q1=MTWM;Q2=MTWN;R1=NTWN+r。
当车辆参数值和加权矩阵值确定后,LQR最优控制反馈增益 由黎卡提方程求出,黎卡提方程的具体形式为
由黎卡提方程求出,黎卡提方程的具体形式为


(9)式(9)中:P为正定矩阵。
求得的LQR反馈控制增益及最优控制力为

(10)

(11)
将改进天棚阻尼力[式(6)]以负反馈形式表示,即Fd,msky=-Kmsky·z
(12)式(12)中:Kmsky=[cmsky cmv]为改进天棚控制增益; 为改进天棚控制的反馈状态变量。
为改进天棚控制的反馈状态变量。
反馈状态变量z与x之间满足z=Hx
(13)
式(13)中:
将式(13)代入式(11),得到以x为反馈状态变量的改进天棚阻尼力:
Fd,msky=-Kmsky·H·x
(14)比式(11)、式(14),改进天棚控制增益Kmsky可以通过最小化式(15)范数[12]得

(15)式(15)中:Δ为Kmsky所有可取值的集合,即

则改进天棚阻尼控制增益为

(16)
求得控制增益 后,即可得到改进天棚控制阻尼系数,实际改进天棚控制力为d,msky=
后,即可得到改进天棚控制阻尼系数,实际改进天棚控制力为d,msky=
(17)式(17)中:ud,msky为实际改进天棚控制力。
2.4 多模式垂向控制策略实施
对于舒适模式,主要以提高舒适性为目的,采用经典的天棚控制;对于运动模式,主要以提高操稳性为目的,采用地棚控制;而对于标准模式,则采用改进天棚控制策略,同时兼顾舒适性和操稳性。
天棚阻尼系数和地棚阻尼系数在大量仿真数据基础上选定,通过综合比较不同阻尼系数时的车辆振动响应量均方根值,取天棚阻尼系数csky=2 500,地棚阻尼系数cgrd=3 000。改进天棚控制增益是通过最小化LQR最优主动阻尼力和改进天棚控制阻尼力之间的差值得到,改进天棚阻尼系数为cmsky=2 125,cmv=120。
式(3)、式(5)、式(17)所述阻尼控制力需转化为电流信号才能作为DCC实际控制器的输出。图3为通过减振器台架试验实测的阻尼特性曲线,在阻尼力已知时,结合减振器相对运动速度通过插值就可获得对应的控制电流。
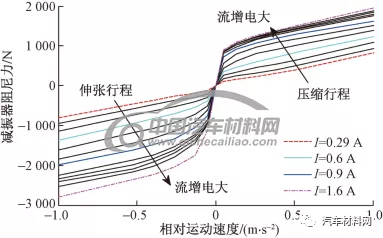
I为控制电流
3 结果验证
3.1 仿真验证
基于Carsim/Simulink搭建联合仿真平台,分别在A、B、C三级路面,车速依次为30、60、90、120 km/h。为便于结果分析,3种模式下的结果分别用舒适、标准、运动表示。
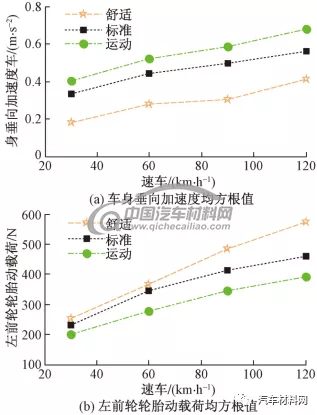
图4为B级路面不同车速下的振动响应量均方根值。由图4(a)可知,与标准模式相比,舒适模式下的车身垂向加速度较小,而运动模式下的数值较大。由图4(b)可知,运动模式时轮胎动载荷最小,其次是标准模式,而舒适模式下的轮胎动载荷最大。分析其原因为:舒适模式采用经典天棚控制,仅以车身垂向速度为反馈状态量,故车身垂向加速度较小,而轮胎动载荷较大;运动模式采用地棚控制,以轮胎垂向速度为反馈状态量,故轮胎动载荷较小,而车身垂向加速度较大;标准模式采用改进天棚控制,同时把车身垂向速度和悬架相对运动速度作为反馈状态量,其控制效果介于舒适模式和运动模式之间。总的来看,随着车速的升高,振动响应量的均方根数值呈上升态势。
图5为车速90 km/h时在不同路面等级下的振动响应量均方根值,从图5可以看出,随着路面等级的升高(A~C级),振动响应量的均方根数值均呈上升态势。
3.2 实车验证
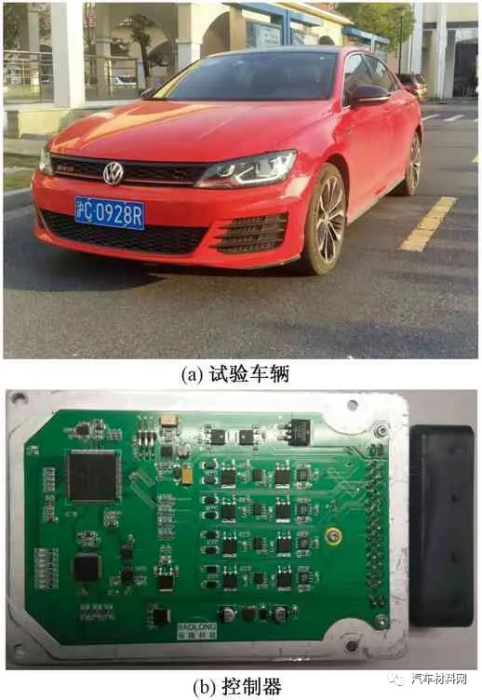
自主完成DCC控制器开发、匹配和标定,并与原车自带控制器和被动减振器进行控制效果对比。图6为试验车辆和自主研发控制器实物图。
3.2.1 随机路面工况
试验车辆分别以40、60、80 km/h驶过试验路段,表1为80 km/h时的加权加速度均方根值。从表1可以看出,自主研发控制器的控制效果明显优于被动减振器和原车控制器,其中在标准模式下与原车控制器相比,驾驶员座椅面和后排座椅面的数值分别减小了8.93%、11.79%。

3.2.2 减速带工况
试验车辆分别以20、40、60 km/h通过指定减速带。根据国家标准《汽车平顺性试验方法》(GB/T 4970—2009),减速带工况(脉冲输入)下的行驶评价指标用最大(绝对值)加速度响应来表示,即
(18)式(18)中:n为有效试验次数; 为最大(绝对值)加速度响应,
为最大(绝对值)加速度响应, 为第j次试验结果的最大(绝对值)加速度响应,m/s2。
为第j次试验结果的最大(绝对值)加速度响应,m/s2。
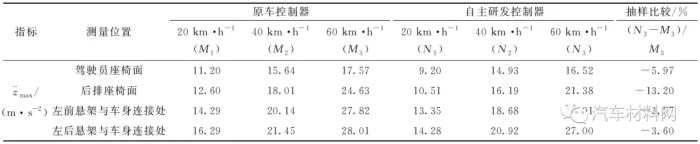
按照式(18)计算不同车速和不同模式下的行驶评价指标,结果如表2~表4所示,与原车控制器相比,在自主研发控制器作用下,车辆不同测量位置的最大(绝对值)加速度响应值都明显减小,其中在标准模式下,车速为60 km/h时,驾驶员座椅面和后排座椅面的数值分别减小了8.29%、9.02%。故在减速带工况验证了控制策略和所研发控制器软、硬件的可行性。
4 结论
(1)设计了针对DCC多种模式的垂向控制策略,自主完成控制器的开发、匹配和标定,进行了整车级的道路实车对比验证,为DCC系统国产化提供参考。
(2)建立了半主动悬架1/4车辆模型,研究经典天棚和地棚控制算法,并在此基础上提出改进天棚控制策略,将其分别实施于动态底盘控制系统的舒适、运动和标准3种模式。
表1 随机路面工况车速80 km/h时加权加速度均方根值
Table 1 RMS value of weighted acceleration at 80 km/h under random road condition
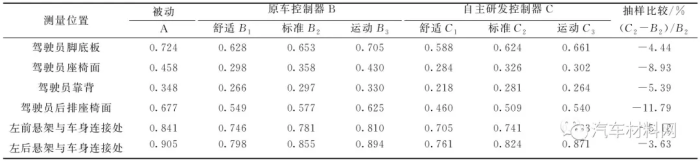
表2 减速带工况定量统计结果(舒适模式)
Table 2 Quantitative statistical results of deceleration belt conditions (comfort mode)
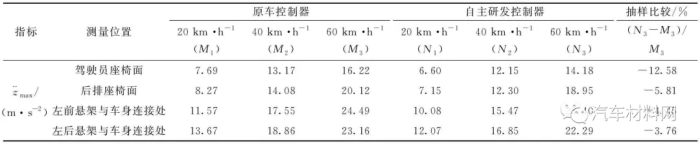
表3 减速带工况定量统计结果(标准模式)
Table 3 Quantitative statistical results of deceleration belt conditions (normal mode)
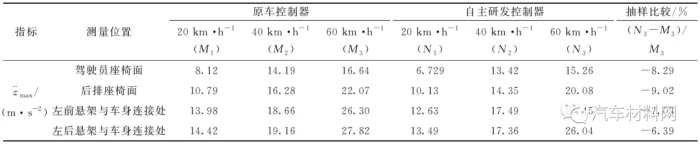
表4 减速带工况定量统计结果(运动模式)
Table 4 Quantitative statistical results of deceleration belt conditions (sport mode)
(3)仿真和实车道路验证结果表明,所提出的控制方案满足DCC系统多种模式可调的需求,并在某些模式下明显优于被动减振器和原车控制器。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论