几何尺寸与公差在底盘副车架中的应用
几何尺寸与公差GD&T 提供了统一的技术标准和解释,从而减少了争议、猜测和假设。设计、生产和检测部门均使用同一种语言进行工作,因此提高了各部门之间的沟通效率。GD&T 的几何公差是一种面向产品功能的图样设计语言,图样设计的终极目标是保证产品的功能,通过GD&T 的图样公差标注,让图样只有一种解释,从而保证不同人读图样不会引起歧义。更重要的是,通过GD&T 几何公差图样的标注,可以在满足产品功能的前提下,放大制造公差,从而提高产品的合格率,降低制造成本。
汽车是一个非常复杂的系统,而零部件制造是有偏差的,为了保证零部件具有互换性以及经济性,所以 GD&T 也非常广泛地应用在汽车工业。
GD&T 的基本概念
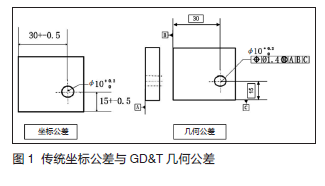
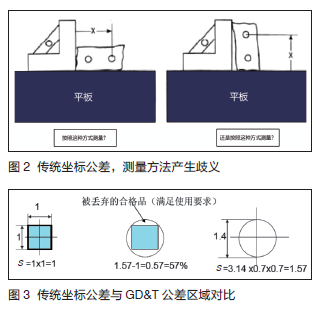
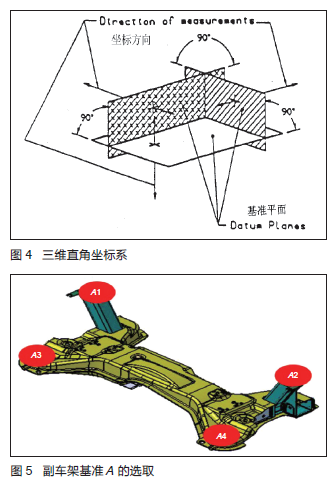
GD&T 即几何尺寸与公差, 英文全称Geometric Dimensioning and Tolerancing,是在设计、制造和检测过程中用于描述零件的尺寸、形状、位置和定位策略等特征的一种精准的工程技术语言。在GD&T 图样诞生之前,19 世纪后期的尺寸公差通常采用传统的坐标体系来表达零件的公差状态,相比传统的尺寸公差表示法,GD&T 有着非常明显的优势,如图1 所示。首先GD&T 图样标注了明确的检测基准和方法,让图样只有一种解释,从而保证不同人读图样不会引起歧义,也就不会发生采用不同的测量方法最终导致不同的测量结果,对图样和测量方法产生不同的理解,如图2 所示。其次,传统公差孔的位置度与孔的尺寸公差无关,而GD&T 图样中有实体原则,如图1 右中的最大实体符号,有了这个最大实体要求,从功能上看,当尺寸要素变小,尺寸公差可以转化给位置度公差,从而降低制造精度的要求。如图1 中GD&T图样所示,如果孔径尺寸为φ10.2 mm,这个孔的位置度可以得到0.2 mm 的补偿,所以位置度公差为φ1.6 mm,从而在满足装配功能的前提下降低了制造精度要求并节约了成本。另外在满足装配的功能要求下,采用GD&T 公差比传统公差区域要大,因为GD&T 的公差带是圆形的,而传统公差带是方形的,传统方形公差带会使很多满足功能要求的零件被当作不合格品而废弃,如图3 所示,通过对传统公差带和GD&T 圆形公差带对比可知圆形公差带可以比方形公差带节约57%的成本,从而大大增加合格率,这是应用GD&T 最大的好处。
底盘副车架中GD&T 的应用
GD&T 非常广泛地应用在汽车工业,汽车中各个零部件都有涉及,GD&T 在底盘副车架是如何应用的呢?如何创建合适的基准体系,位置度公差标注和副车架尺寸公差对整车外倾角度的3DCS 分析计算,为副车架的公差标注设定提供一定的参考。
1. 副车架零件基准体系选择
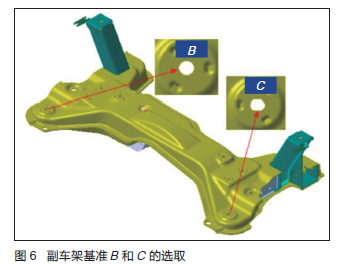
三维直角坐标是有三个互相垂直的理想平面构成的空间直角坐标系(图4)。零件在空间直角坐标系内包含6 个自由度,分别为X 、Y 、Z 三个平移方向自由度和绕X 、Y 、Z 轴的旋转自由度,而基准系统是要充分约束被测零件的自由度来测量零件,评估零件的制造精度是否满足图样要求。基准的选择是为了满足零件的功能和装配要求,基准特征通常是装配时的定位和安装特征,所以副车架的基准体选择首先选取副车架与车身的安装平面作为基准A (图5),约束一个方向的自由度。基准B 为副车架与车身左后安装孔,为圆孔,约束3 个自由度。基准C 为副车架与车身右后安装孔,为腰形孔,约束2 个自由度(图6)。基准选择符合1-3-2 原则,充分约束了零件的6 个自由度,这种基准体系选择可以作为副车架基准体系选择的参考。
2. 位置度公差在副车架中的应用
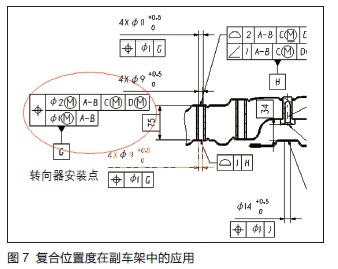
副车架上很多安装孔位,包含与车身的安装孔、转向器、稳定杆及各连杆或摆臂安装孔,各安装孔常用位置度公差来标注。GD&T 中难度较大的是复合公差要求,而副车架的转向器安装孔经常会用到, 如图7 所示。首先复合位置度的上层公差带表示转向器左右各安装孔相对于基准A-B、C、D 有位置度公差要求2.0,控制左右两个安装孔相对于基准A-B、C、D 的旋转和平移的位置度。复合位置度的下层公差控制两个孔之间的方向,公差带为1.0 相对基于准A-B,表示两孔之间关系。
3. 3DCS 校核副车架公差定义
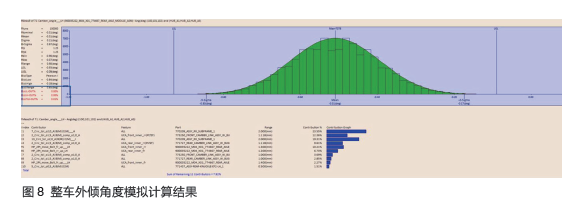
本文分析的是某后副车架公差对整车外倾角度的计算。首先通过3DCS (DimensionalControl System Point) 建立起各零部件的基准装配体系。其次建立虚拟件,模拟工装工作。然后建立DCS 匹配点和测量点,并将相关公差引入该点,最后按照工艺路线建立运动装配(Move),模拟工艺装配过程。3DCS 软件采用Monte Carlo 算法,运行100 000 次得出分析结果。图8所示为整车外倾角度的模拟计算结果,其各主要参数含义如下:
① Runs :软件模拟运行次数;
② Nominal :测量项设计间隙值;
③ Mean :计算结果平均中值;
④ STD/signma :标准差;
⑤ MIN/MAX :计算结果最小/ 最大值;
⑥ LSL/USL :公差设计下/上极限偏差值;
⑦ L/H-OUT% :下/ 上极限偏差公差超差率;
⑧ Tot—OUT% :总的超差率;
⑨ Est.Type :公差计算结果分布类型;
⑩ Est.Low ~ High :公差计算最小/ 最大值。
图8 右侧公差分布图的横坐标为测量项的运算距离值,纵坐标为对应测量值的运行次数(样本数)。测量项l 的标准差STD=0.11 °, 即该测量项的六西格玛(6sigma) 计算值为0.67°,整车外倾角度公差为±0.51°,总超差为0.01%,计算结果表明目前副车架定义的公差满足要求。
总结
GD&T 图样标注有诸多好处,让图样只有一种解释,从而保证不同人读图样不会引起歧义,可以在满足装配功能要求的前提下降低制造精度,使更多产品合格,降低生产成本。GD&T在汽车制造过程中应用越来越广泛,本文描述了GD&T 在底盘副车架中的应用,就如何创建合适的基准体系、位置度公差标注和副车架公差定义值对整车外倾角度的影响进行了阐述,为副车架的公差设定提供了一定的参考。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论