悬挂轨道式旋杯涂装机器人
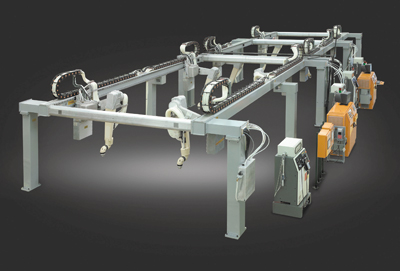
图1 P-500 外部旋杯涂装系统
涂装机器人广泛应用于汽车及汽车零配件行业,本文将介绍一种新型的悬挂轨道式机器人,同传统的涂装机器人相比,这种机器人喷涂效率高、成本低、安装空间及尺寸小,是目前用于整车外部涂装的理想设备。
近年来,随着涂装车间机器人应用的发展,汽车喷涂的效率、质量取得了显著的提高,运行成本和投资也在不断降低。某国际著名涂装机器人公司推出的悬挂轨道式喷涂机器人——P-500型外部喷涂机器人系统更是其中的佼佼者(图1),它能够做到以较低的成本、更小的安装尺寸和更少的安装时间,处理更大范围的车型。
领先的技术
目前,在研究人员主要关注的是两个方面的优化:即机器人应用于100%静电雾化器(或称旋杯)的车体外部喷涂和机器人应用于运动的输送链上的车体内部喷涂(如门内侧、引擎室、底盖等)。机器人100%外部旋杯喷涂的应用开发着重于旋杯设计和涂料的混合比例,以使金属漆能够用旋杯达到可以接受的颜色和外观标准。与以前的空气枪喷涂工艺相比,这种“杯+杯”工艺显著地减少了涂料的使用量。
P-500型外部喷涂机器人系统采用了安装在机器人手臂中的涂料换色模块组,它可以尽可能地接近喷杯(图2),这样可以最大限度地减少涂料浪费,此类改进措施大大提高了设备的喷涂效率,缩短了系统正常运行时间,降低了设备投资。
P-500型外部喷涂机器人系统的外表面喷涂系统是非常成功的,其所使用的悬挂于轨道的机器人喷涂车身外表面技术在汽车工业的车身外表面喷涂上产生了深远的影响。
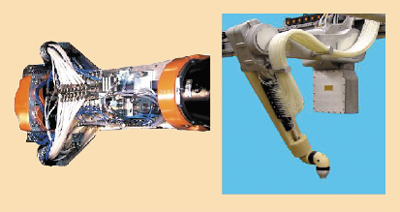
图2 集成的机器人手臂
P-500型外部喷涂机器人系统的设计方法还引发了数个区域的创新思维,它拥有多项专利和专利应用,这些区域涉及到机器人设计、工艺设备设计、生产维护、程序设计方法以及安装。 P-500型外部喷涂机器人系统还提供了最高级别的均匀性和喷涂工艺效率,其专利的工艺方法和优化的喷涂设备设计可使生产过程中产生的超范围喷涂最小化。
系统的特点
悬挂轨道式涂装机器人系统提供了比传统机器人更强的喷涂性能,其车体外表面喷涂系统减少了用户的成本和生产费用,可以比固定安装的机器人更快地安装和调试。悬挂轨道式涂装机器人系统的主要优势有:
1、 机器人更小、更灵活简便
研究人员通过对机器人机械单元的机器人运动学设计的开发,对现存于生产的其他系统进行了分析,在此基础上重新进行了设计,新设计的悬挂机器人去掉了腰部的轴,又使用了一个两轴的手腕,这些改进使机器人能够喷涂到很多原来难以处理的车身局部, 增加了适应新车型设计要求的能力和喷涂自由度的灵活机动性,能够用于较大范围的车型。
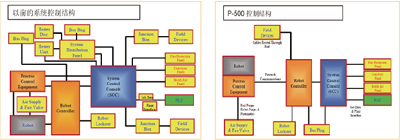
图3 P-500控制体系与以前的系统的比较
P-500型外部喷涂机器人系统的轨道方式提高了喷涂路径的灵活性和可操作性,减少了喷涂设备对输送设备的依赖性,比固定式更易于在线跟踪编程。 此外,P-500型外部喷涂机器人系统还除去了外部喷涂应用中多余的轴,使这种5轴机器人集成了7轴机器人的优点,而且5轴的编程设计相对于6轴或7轴机器人来说要简单得多。
由于大多数应用设备嵌入到了P-500型外部喷涂机器人系统中,室外安装设备的数量低于一般固定式系统,使得系统开关枪和喷幅转换更加灵敏。而且P-500型外部喷涂机器人系统采用了PaintPRO软件编程,该软件是一个图形化的离线编程解决方案,所有的路径编程均可在安装与建模期间完成,节约了后续安装与调试的时间。
2、喷涂质量易于控制
配置轨道的P-500型外部喷涂机器人系统可以提供最长的喷涂时间和最少的非喷涂动作,而固定式机器人在对路径进行编程或改变颜色后,需要频繁地重新定位。此外,P-500型外部喷涂机器人系统的轨道方式比固定式易于在线跟踪编程,这种方式提供了最长的开枪时间、最小流量、最大的涂料利用率,这在考虑降级和喷涂窗口的有效性时,是非常重要的。而固定式的机器人运动速度快,这使得涂料流量相应增大,导致涂料利用率、品质降低。
而且,P-500型外部喷涂机器人系统的轨道轴可以保证机器人在任何输送速度下都可以重放相同的机器人动作,不会出现意外错误动作和异常机器人动作。设计方案装配了完全一体化工艺控制的P-500型外部喷涂机器人系统在喷涂过程中,可以对流体和气动工艺的变化做出非常迅速的、重复性的响应,这使得喷房气流对悬挂机器人的影响比起固定式或地面轨道式机器人来要小。
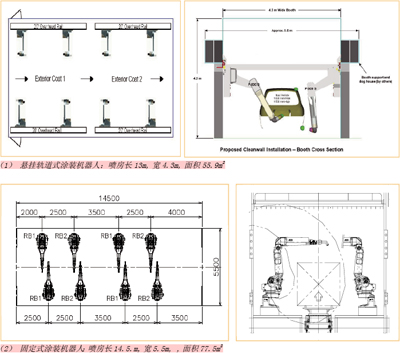
图4 P-500机器人和固定喷房比较
3、降低了客户的直接成本
P-500型外部喷涂机器人系统(简称P-500机器人)使客户的直接成本在两个方面显著减少:
(1)机器人系统自身的价格降低:
□ 每一台机器人控制器控制两台机器人;
□ 系统的钢结构用作电缆线槽和软管路径,使得到单台机器人的连接数量减少;
□ 一个公用的空气控制柜用于供应多台机器人;
□ 由于大多数应用设备嵌入到了P-500机器人中,室外安装的设备数量低于固定式系统;
□ 控制体系中互联的数量显著减少。
(2)机器人系统所需的空间减少了约40%,显著地减少了喷房的工程费用:
□ 喷房的长度和宽度减少,同许多固定式机器人相比,按照最新运动学设计的P-500 机器人由于没有大旋转轴,不需要在室内预留1~2m长度的空间以达到操作员的安全需求,所以缩短了喷房尾部的安全区,并因此缩短了喷房的整体长度,同时还减少了喷房的宽度(如图4);
□ 悬挂方式不需要安装在喷房内钢架上,无需考虑机器人的基础,减少了支撑机器人的型钢和底架;
□ 在P-500机器人系统中没有毫无价值的附加工艺设备,格栅不需配制;
□ 在喷涂设备和自动清洗旋杯设备新方法的设计改进过程中,去除了系统对空气加热器的需要,这减少了系统的复杂性,节省了电力、降低了运行成本。
图5 PaintPro 离线编程软件
4、降低了客户的运行成本
(1)与以前的机器人系统相比,小的安装面积使其所需的能耗减少,大多数情况下可节约20%以上的运行费用。
(2)P-500机器人具有非导电外臂和腕,在室内悬挂,使传递效率达到最大,涂料在机器人中的堆积最少,降低了清洁频次和车体污染,机器人护套也无须象常规机器人那样频繁更换,降低使用成本。
(3)保证了地面的清洁,这体现在4个方面:系统需要的控制柜的数量减少,占地面积小;提供了一个简约的过道空间,减少了面板、连接盒及其他部件的使用;把不需要的和常规控制柜放在中间层,远离地板;设计的高空悬挂式系统不需要安装在喷房地面支撑钢架上,降低了喷房振动时造成的喷涂污染地面,清洁费用低。
5、其他优点
(1)设备编程方便:
□ PaintPro离线式可编程软件采用了与实际机器人相同的运动计划器,简化了编程路径,可以快速生成机器人程序。
□ 通过电脑,所有的路径编排均可在安装与建模期间完成,节约了安装与调试的时间。
□ 5轴机器的编程相对于6轴或7轴机器人来说要简单得多,P-500机器人的这项设计集成了7轴机器人的所有优点。
(2)设备安装方便:
□ 设备由标准的工艺和系统组成,包括集成式气动控制面板以及标准的电缆组线,减少了安装时间。

图6 实际P-500安装显示了工艺的能见度
□ P-500机器人的喷涂系统出厂时已经完全组装好,并且经过充分的测试,气动装置、成型空气控制以及杯速控制组件的应用均以涂装校对标准进行过预先校准。同传统固定式系统比较,在现场安装设备所需要的时间和成本大大降低了。
(3)设备操作维护方便:
□ 操作介面和PLC安装在一块面板上,可简单、快速地处理故障。
□ 易于安装换色阀及管路,减少了维护,且简化与改进了涂料管及空气管路的排布,从而减少了大量易损件。
(4)P-500 机器人为高架式设备,充分体现了“清洁墙”设计,它允许在机器人轨道下面放置检修门,同固定式机器人相比较,室内喷涂过程的可视度提高了。
(5)可用于水性静电旋杯喷涂:
喷涂设备的最大的突破之一就是可用于水性静电旋杯喷涂。P-500机器人开发了一个高效直充喷涂而无需外部码头或容器交换的系统,这个新方法不仅显著增加了水性系统的喷涂效率,而且显著地减少了与之相关的设备复杂性和维修成本。
总结
P-500 悬挂轨道式喷涂机器人是理想的车体外表面喷涂机器人,提供了高性能、高耐久性、柔性化、操作简便和少维护的完美组合。这个系统在提高运行效率和工件外部的喷涂质量上取得了成功。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖