焊接机器人控制器的研发
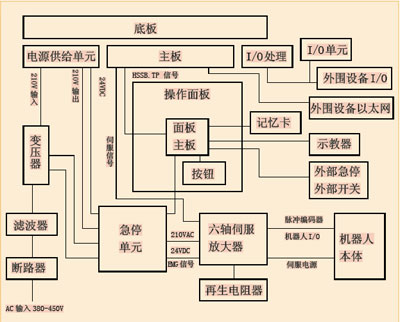
图1 FANUC机器人的控制原理
机器人控制器是影响焊接机器人性能的关键部分之一,对开发焊接机器人起着至关重要的作用,奇瑞汽车有限公司吸收现有焊接机器人控制器的先进技术,正在开发高质量、低成本的国产焊接机器人控制器。
轿车车身大约有3000~4000个焊点和3m以上的焊缝,规划产能达到20万辆/年的轿车焊接生产线,几乎都必须使用焊接机器人。焊接机器人不仅能满足工艺要求、保证焊接质量,还可以保证焊接生产线的自动化、规模化和柔性化。
奇瑞汽车有限公司(以下简称奇瑞公司)使用的焊接机器人有日本FANUC机器人、德国KUKA机器人和意大利COMAU机器人等,由于机器人品牌众多,相关技术人员难以准确掌握关键技术,设备维护难度大,备件储备费用高。因此,我们根据现场的实际情况,对各家机器人控制器进行分析,逐步完善和统一标准,为开发国产焊接机器人打好了基础。
焊接机器人控制器分析
1、FANUC控制器概述
FANUC机器人主要应用于奇瑞公司焊装一车间,是奇瑞公司最早引进的焊接机器人,也是奇瑞公司唯一用到附加轴的焊接机器人。
FANUC机器人内部结构相对集成化,主控机采用32位CPU控制,用于机器人运动插补运算和提高坐标变换的运算速度,它采用64位数字伺服驱动单元,同步控制6轴运动,运动精度大大提高,最多可控制21轴,进一步改善机器人动态特性。FANUC机器人还支持离线编程技术,技术人员可通过离线编程软件设置参数,优化机器人运动程序。图1为FANUC机器人控制原理图,图2为FANUC机器人。
图2 FANUC机器人
2、FANUC控制器内部结构
以FANUC-R-J3iB控制箱内部结构为例,FANUC控制器内部结构共分为6大工作部分:
(1)电源供给单元:由变压器向电源分配单元输出230V交流电,通过该单元的系统电源分配功能,负责对控制箱内部各工作板卡输出210V交流及±15V,+24V直流电。
(2)安全保护回路:由变压器直接向急停单元供电,并接入内部各控制板卡形成保护回路,对整个系统进行电路保护。
(3)伺服放大器:不仅提供伺服电机的驱动、抱闸电源,并且与绝对值编码器实现实时数据转换,与主控机间采用光纤传输数据,进行实时信号循环反馈。
(4)输入/输出模块:标配为ModuleA/B,另外可通过Profibus板、过程控制板与PLC及外围设备进行通信。
(5)主控机:整个控制系统的中枢部分,包括主板、CPU、FROM/SRAM组件及伺服卡,负责控制器内部及外围设备的信号交换和处理。
(6)示教器:示教机器人的工作轨迹和参数设定,以及人机交互操作。
3、KUKA控制器概述
KUKA机器人主要应用于奇瑞公司焊装二车间,其内部结构相对开放化,采用分散控制方式,按系统的性质和方式将系统控制分成几个模块,每个模块有不同的控制任务和控制策略,各模式之间可以是主从关系,也可以是平等关系。这种方式实时性好,易于实现高速、高精度控制,易于扩展,可实现智能控制,是目前流行的控制方式。KUKA机器人采用Windows操作界面,使得人机界面更加友好。在应用方面也因为其结构简单、性能稳定、便于操作、备件更换方便,而成为最受用户欢迎的焊接机器人品牌。图3为KUKA机器人控制原理图,图4为KUKA机器人。
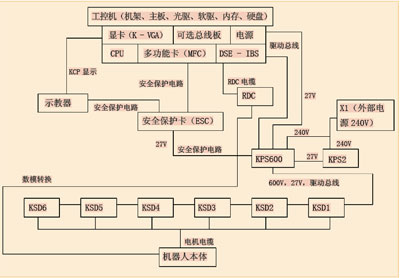
图3 KUKA机器人的控制原理

图4 KUKA机器人
4、KUKA控制器内部结构
以KUKA-KR C2控制箱内部结构为例,KUKA控制器内部结构共分为6大工作部分:
(1)电源供给单元:包括主电源和辅助电源,由变压器分别向主、辅电源输出240V交流电,经过变压,辅助电源向工控机、安全模块、电机制动、电池等模块提供27V直流电,主电源向各伺服驱动器提供600V电压。
(2)ESC安全系统:由主电源直接向ESC卡提供27V直流电,并与工控机、示教器及外围设备连接,对整个系统进行电路保护。
(3)伺服驱动器(KSD):与工控机间采用INTERBUS总线方式通讯,标配为6个分散独立的驱动器实时控制6轴运动,柜内最多可扩展到8轴。
(4)RDC数模信号转换模块:由旋转变压器将位置及温度信号反馈给RDC,进行数模转换后传输到工控机内DSE-IBS卡,数据处理后通过主电源,控制各驱动器对伺服电机进行驱动。
(5)工控机:整个控制系统的中枢部分,负责与主电源、安全回路、RDC及外围设备进行信号交换和处理,除标准配置外,还包括MFC卡(控制安全回路,非可屏蔽性中断)和DSE-IBS卡(与RDC串口通讯,输出到KSD,实现双环控制)。
6)KCP示教器:机器人示教编程,变量、参数设置工具,负责所有人机交互操作。
5、COMAU控制器概述
COMAU机器人主要应用于奇瑞公司焊装三车间,其控制系统采用主从控制方式,通过主、从两级处理器实现系统的全部控制功能。主CPU担当系统管理、故障诊断、机器人语言编译、应用程序执行、I/O信号通讯和人机接口管理,同时也利用它的运算能力完成坐标变换、轨迹插补等工作。COMAU机器人从CPU通过数字伺服放大器同步驱动各运动轴,实现所有关节的运动控制。主从控制方式系统实时性较好,适于高精度、高速度控制,但标配系统只能扩展2个附加轴,若想控制更多的运动轴,必须另外安装扩展电源机架。图5为COMAU机器人控制原理图,图6为COMAU机器人。
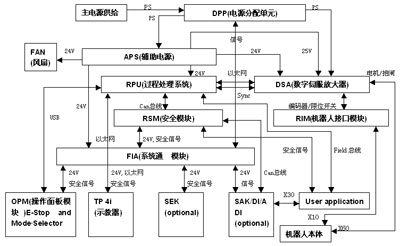
图5 COMAU机器人的控制原理

图6 COMAU机器人
6、COMAU控制器内部结构
以COMAU-C4G控制箱内部结构为例,COMAU控制器内部结构共分为6大工作部分:
(1)电源分配系统:由电源分配单元向辅助电源和数字伺服放大器提供主动力电源和25V抱闸电源,再通过辅助电源向数字伺服放大器、过程处理系统、系统通讯模块等单元提供24~25V直流电源,并通过系统通讯模块向安全模块提供24V直流电源。
(2)RSM安全保护系统:与过程处理系统、系统通讯模块、外围设备等单元进行安全信号通讯,实现整个系统安全保护。
(3)伺服驱动单元:数字伺服放大器通过机器人接口模块反馈编码器信号,与运动控制处理器间通过INTERNET进行通讯,提供伺服电机的驱动电源和抱闸电源,控制机器人运动。
(4)FIA系统通讯模块:负责与各控制单元及外围设备进行通信并收集和分配所有信号。
(5)过程处理系统:整个系统的主控制模块,包括系统主处理器、运动控制处理器,以主从控制的方式进行工作处理。
(6)TP4I示教器:人机交互的工具,具有示教编程,变量、参数设定、信息显示等功能。
焊接机器人控制器设计思路
通过对FANUC、KUKA、CAMAU焊接机器人的控制器进行分析,我们大致总结出焊接机器人控制器内部结构主要包括:1、电源部分;2、安全保护部分;3、伺服驱动部分;4、I/O通信部分;5、系统主控部分;6、示教器。各部分分工明确,联系紧密,有效地保证了控制器的正常工作。
部分机器人厂家基于自己的独立结构开发的控制器,无论从软件还是硬件都难以扩展和二次开发,都有一定的局限性。随着机器人控制技术的发展,为了解决结构封闭的机器人控制器的缺陷,开发“具有开放式结构的模块化、标准化机器人控制器”是当前机器人控制器的一个研究方向。例如:德国KUKA公司基于PC开发的具有开放式结构、网络功能的机器人控制器,该控制器设计的各个层次对用户开放,方便用户扩展和二次开发。
因此,对于控制器的设计,我们提出以下思路:
1、利用基于非封闭式计算机平台的开发系统,如Sun、SGI,有效利用标准计算机平台的软件和硬件资源为控制器扩展创造条件。
2、利用标准的操作系统,如Windows、Vxwork;使用标准的编程语言,如C、C++,采用标准操作系统和编程语言,可以解决各种专用机器人语言互不兼容的问题。
3、合理的模块化设计,有效划分任务,使不同的子任务由不同的功能模块实现,这不仅利于安装、调试及维护,更方便修改、添加、配置功能,提高了系统的可靠性。
4、采用标准总线结构,方便扩展或更改控制器内部配置及改进其功能,如各种传感器,I/O板、运动控制板可以很容易地集成到原系统。
这样建立起来的控制系统,不仅性能稳定、开发周期短而且成本较低,模块化还使系统开放,易于修改、重构和添加、配置功能。
结束语
随着汽车行业焊接制造装备、电子技术、计算机技术的迅猛发展,焊装机器人技术得到完善,焊接机器人控制器技术更是得到了突飞猛进的发展。奇瑞公司面对新的机遇和挑战,引进、消化和吸收现有焊接机器人先进技术,通过应用研发和二次开发,开发高质量、低成本的焊接机器人控制器,为焊接机器人产业化做好了铺垫。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖