摄像头、雷达、激光雷达——自动驾驶三大传感器的未来趋势
听半导体供应商谈自动驾驶传感器。
要想在2021/2022的年度车型上实现SAE L4/L5的全自动驾驶功能,就需要应用多种传感器冗余系统。当今的半自动驾驶系统采用了各种各样数量和设计的雷达和摄像头系统。而高性能价格合理、能检测300米半径内信息的激光探测与测距系统开发,还处在预研阶段。大多数汽车制造商都认为,如果要实现全自动驾驶,雷达,摄像头和激光雷达这三大传感器系统缺一不可。
本文介绍了上述几种传感器系统的主要特点、优劣势和技术的发展现状。此外还从供应商角度讨论了实现智能和低成本解决方案所需的半导体元器件。本文作者Uwe Voelzke为半导体行业从业人员,车云菌进行了全文编译。

到底是什么自动驾驶?
如果一辆车配备了巡航和限速功能,这算是自动驾驶吗?当然不算,但如果加上自动距离保持和自适应巡航控制(ACC Adaptive Cruise Control)、并且司机可以在某些情况下短暂地将控制权交给车子本身呢?
对于自动驾驶的不同类别划分已经在以下表一中列出了。这一分类在美国是基于国际工程与汽车工业协会SAE3016标准列出的,在欧洲则是联邦高速公路研究所制定的。具体可以参考车云菌以往的文章,这里不做赘述。
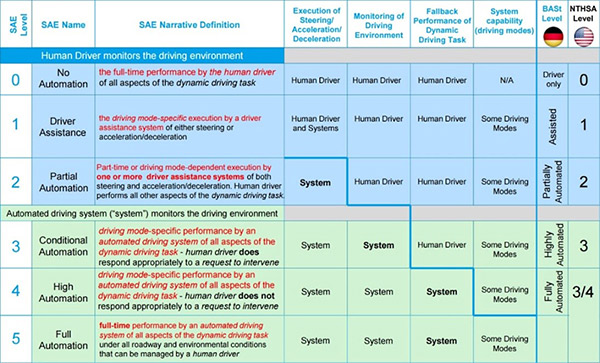
自动驾驶分级
到目前为止,没有汽车制造商能在量产的汽车中实现L3或更高等级的自动驾驶功能,但也有一部分已经生产出了样车。有些国家正在制定法律,以准入一些预计2020/2021上市的SAE L3自动驾驶汽车。
要实现L1-L5自动驾驶分别需要什么样的传感器?如上文所说,目前有基于摄像头/雷达/激光雷达的三种传感器系统。尽管停车所需的超声波传感器目前已被广泛应用,但它们对自动驾驶来说没什么作用。摄像头和雷达系统如今都已经配备在了自动驾驶L1和L2的汽车上,它们也是是实现更高等级自动驾驶的先决条件。

图1:汽车中使用的不同传感器
如今的摄像头系统采用CMOS图像传感器(complementroy meta-odix sensor互补金属氧化物半导体,一种大规模集成电路制造工艺和技术),能达到100-200万像素的高清传感器。单\双目摄像头和雷达系统融合,能为驾车人提供障碍物或者移动物体的速度、距离和外观形状等信息。近程(工作在24 GHz)或远程(工作在77GHz)雷达传感器一般装在车身的前部和后部,用来确定车身前后的交通状况,它们能监控从距离1厘米到数百米间的状况。目前,激光探测系统很少被用于汽车量产中,这一技术的巨大潜能还有待继续开发,但首先需要解决成本和满足车规标准的问题。
摄像头
后视和360度摄像头
视频影像能给人类司机提供很多驾车信息,同时也能作为输入信息被用于高度自动驾驶汽车。后视和360度摄像头能让司机更好地了解车子周围的环境状况。如今,2D摄像头在显示图像和加载更多辅助信息(如轮胎转向角度等)方面非常常用。高端品牌车商更开始在车上加装带有3D影像显示功能的摄像头了。
为了让3D显示更加真实,通常需要4-6个摄像头联合输入信号。而且在“图像拼接”过程中需要格外注意,以防损失任何图像信息或者产生重影。
不论2D还是3D摄像头都需要图像传感器有至少130dB的高动态范围(动态范围指一个多媒体硬盘播放器输出图像的最亮和最暗部分之间的相对比值)。只有这么高的动态范围才能保证,即使阳光直射到镜头上,传感器也能得到清晰的图像信息。目前市场上最好的图像传感器动态范围达到145dB,通过24位的接口与图像信号处理器(ISP Image Signal Processor)相连。普通的镜头系统动态范围远远低于这个值。
另一个关键品质特征则是图像传感器的光线强度。目前,市场上最好的传感器信噪比(SNR Signal to Noise Ratio输出信号同时输出的噪声信号的比值)能达到1比1mlx(毫勒克斯),每秒显示帧数达到30帧。
当前,汽车后视和360度摄像头系统通常采用中央集中架构。也就是说,一个中央控制模块统一处理4到6个摄像头的原始数据。而由于这种数据处理是通过软件完成的,就对处理器提出了很高的要求。因为需要更多的FPGA(Field-Programmable Gate Array,即现场可编程门阵列,一种可编程半定制集成电路,可以更快更好地实现集成电路设计功能)来加快硬件处理的速度,在系统中造成了很高的能量损失。最新的数据压缩方法也需要大量的存储空间。
以下图片展示了另一种方法,该方法将图像处理过程分散在各个摄像头上,再将处理后的数据通过Ethernet(局域以太网)传送给汽车车机主机(包含主显示屏控制功能的电子控制模块),从而完成图像的收集和显示。单个的图像信息在摄像头内处理,再通过以太网接口和短延时视频编码器H264被送到音响主机的主处理器中。图2展示的是未来车载摄像头系统从模拟信号向数字信号发展的过程。
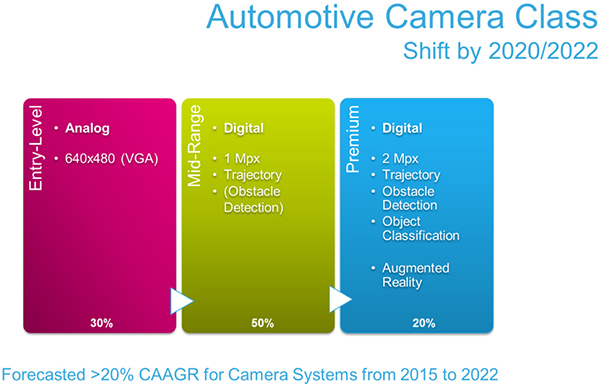
图2:未来车载摄像头系统从模拟信号向数字信号的发展
到2020年,大多数摄像系统都将是以数字信号为基础的。现有的数字摄像系统将获得的原始数据处理后送到显示模块进行图像显示。图3则展示了这一过程。
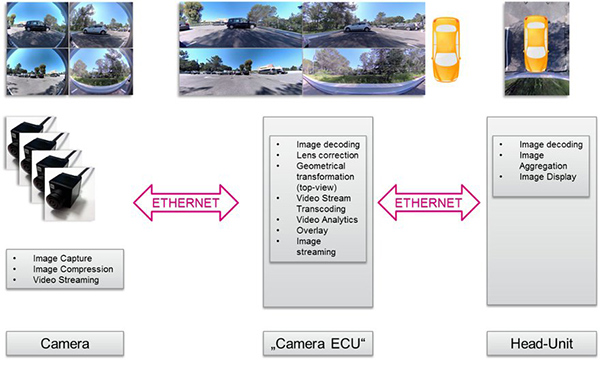
图3:中央集中式图像处理
非中央集中化的方式完全去掉了摄像头控制模块(ECU),只留下了智能摄像头和车机主机。说得更直白一点,这一方法在摄像头和中央摄像头控制模块中各有一个处理步骤,图4列出了相关细节。
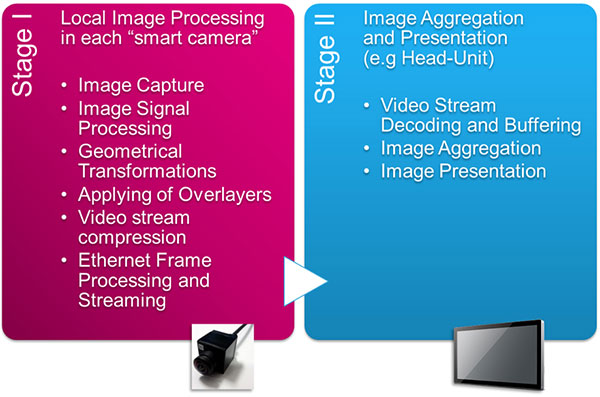
图4:两阶段系统路径
第一阶段(在数码摄像头内部),处理图像信息,完成在视觉效果方面的转换,如鱼眼和滤镜,图像压缩以及以太网处理和传送也在这里完成。第二阶段(在中央摄像头模块里),完成视频解码、中间存储和将图像显示在屏幕上的过程。
这一方法使后视摄像头能够压缩信息并通过以太网传输到车机主机上。图5显示了一个此类高度集成化的数码后视摄像头的技术细节。
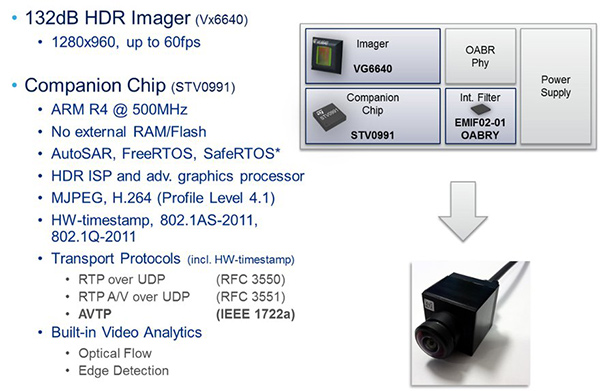
图5:高度集成化的车用后视摄像头
数码摄像头还有一种应用,是将4个摄像头的视频信号融合成一个360度无死角观察视线,如图6所示。
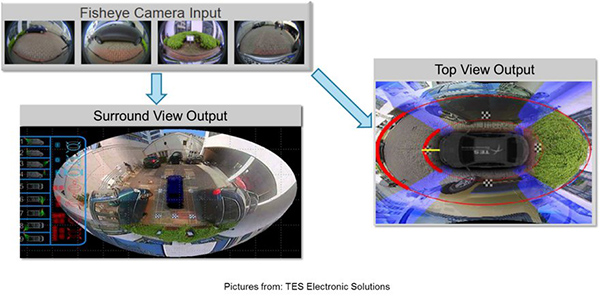
图6:360环视
前视摄像头系统
这一类系统常常用于距离中等或更远的场合,如在90米到250米的距离上。这些摄像头采用算法来自动检测物体、给它们分类并判断出距离它们的远近。例如,摄像头能判别行人和骑自行车的人、摩托车、路边黄线、桥梁桥墩和马路牙子。这类算法也被用在探测交通标识和信号上。
中程摄像头往往会就十字路口的情况、行人、前车紧急刹车、探测到的车道和信号灯情况给司机以警告。长程摄像头则被用于辨识交通标志、基于视频信息控制车距和道路导航 。
在这些摄像头系统中,因为只有直接来源于图像传感器的原始数据会被用到,所以不怎么需要对颜色进行准确地复原。通常,系统会采用带有RCCC矩阵(Red Clear Clear Clear, 指一个像素带有一个红光和三个无色滤镜)的颜色滤镜,从而在大多数图像传感器中得到比RGB(Red Green Blue, 红绿蓝)滤镜更高的光线强度(从而图像也才更清晰)。
中程和远程摄像头之间最主要的区别就是镜头的孔径角度,也叫FoV(Field of View视场)。中程镜头的水平视界(与水平线的夹角)约为70度到120度,而孔径角度更广的摄像头的水平视界通常为35度。
未来的系统会将中程和远程图像的内容通过光学系统集成起来,届时,摄像头的图像传感器将超过700万像素。
雷达
有事故数据表明,超过76%的事故都是仅仅由于人类的错误而产生的;而在94%的事故中,有人类失误的因素在内。ADAS(Advanced Driver Assistance Systems,高级驾驶员辅助系统)配备了数个雷达传感器,从而能很好地支持无人驾驶的整体功能。当然,这里还是有必要说明一下,RADAR全称为Radio Detection And Ranging,即用无线电波探测和定位物体。
目前的雷达系统一般采用24GHz或77GHz的工作频率。77GHz的优势在于其对测距和测速的准确性更高,水平角度的分辨率也更好,同时天线体积更小,也更少出现信号干扰的情况。
以下是SRR(Short-range radar短程雷达系统)和MRR/LRR (mid-range radar, long-range radar中/长程雷达系统)的主要区别。
短程雷达的主要应用方面为:
1) 盲区探测(盲区监控)
2) 车道保持和变道辅助
3) 后置雷达碰撞报警或防撞保护
4) 泊车辅助
5) 十字路口交通监控
中长程雷达的主要应用方面为:
1) 刹车辅助
2) 紧急制动
3) 自动距离控制
短程雷达一般被用于替代超声波传感器以及支持更高等级的自动驾驶。为此,汽车上每个角落都将被安上传感器,车身前端则会装一个用于长程探测的前视传感器。车身360°全覆盖的雷达系统中,车身两侧中部也会另外安装上传感器。
理想状况下,这些雷达传感器都将采用79GHz的频段和4Ghz的传输带宽。但是,全球信号频率传输标准目前在77GHz频道只允许1GHz的带宽。如今,对于雷达MMIC (monolithic microwave integrated circuit单块微波集成电路)的基本定义是“3个发射频道(TX)和4个接收频道(RX)被集成在单块电路上”。
行业内的讨论的热点问题在于:将基带处理功能集成在MMIC上,或是专注于制造仅负责收集原始数据的雷达传感器,哪一种更好。
两者的区别在于,加了基带处理器之后,就有了“预处理数据”,也就是说,有关每个探测对象的速度、距离、信号强度、水平角和垂直角等未被最终验证的信息都在传感器上先预处理过了。反之,仅负责数据收集的雷达传感器则只会提供未经筛选的原始数据,然后传给ECU来处理。图7展示了仅进行原始数据收集的雷达传感器的基本架构。
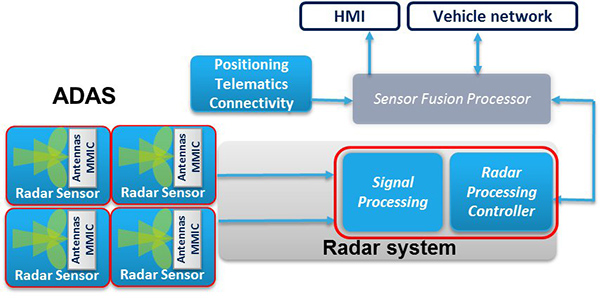
图7:雷达传感器(仅进行原始数据收集)的基本架构
在雷达传感器不进行预处理的情况下,基带处理功能被集成在了雷达处理控制器里,而雷达传感器会将未经处理的数据直接传输给处理控制器。
这一方法有几大优点。首先,将基带处理功能集成化,就能采用一个相对简单的COMS线性结构,而不是射频设备独有的优化技术,这样就能节约所需的单晶硅表面面积,从而降低成本。还有一个优势是将需要散热的位置从雷达系统转移到了控制单元中,由于控制器比雷达传感器的空间更大,从而能更好地解决散热问题。
最后,因为不对数据进行过滤或压缩,也就不会产生数据丢失,控制器能够直接使用来自于传感器的原始数据,从而使信号处理有更多和更灵活的方法。就算这样的情况下对传感器的传输速率有了更高的要求,这也不是问题,因为数据可以通过MIPI CSI-2通信协议接口传输(见图8)。
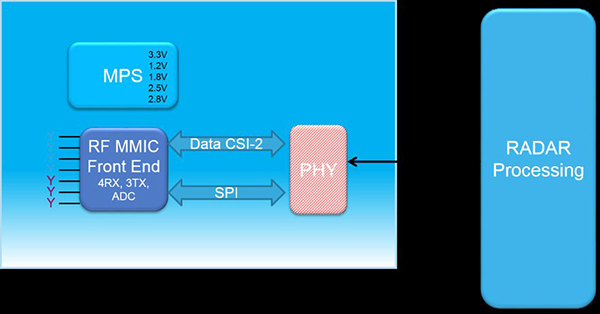
图8:MIPI CSI-2通信协议接口
这一接口协议如今已经被商业化,如用在视频环视系统中。这种架构与图8中的原始数据雷达传感器配合地非常好:信号接口有4条数据线,可以接入4个信号接收器,并配有12位的雷达单块微波集成电路,通信接口的带宽也能达到1到1.5Gbit每秒。
如图9所示,因为这样的雷达传感器布置采用了相同的通信接口,这就简化了摄像头和雷达以及未来的激光传感器(收集到的)数据的融合过程。
MMIC的技术发展有个先决条件,即通过高频技术来实现24GHz或77GHz的频带要求并满足其相应的输出功率。
如今,锗硅异质结双极晶体管已经被用在高频部件上,而单片130纳米CMOS处理器也已经被用于逻辑集成电路。过去的数年里,ST(意法半导体公司,全球最大的半导体生产研发公司之一)已经利用BiCMOS技术生产出了24GHz的单块微波集成电路,。而77/79GHz基带技术的发展也采用了最新的BiMOS9MW技术,CMOS元件的宽度可以达到最小130nm。
针对未来的超高频122GHz频带雷达系统,ST也已经开发出了B55技术。这一技术使锗硅异质结双极晶体管能达到超过320GHz的传输频率,而且还可以被集成在55纳米的CMOS数字逻辑电路上。
除了优化的BiCMOS技术,意法半导体公司还能将片上系统通过公司自行开发的FD-SOI技术集成起来,刷制在仅有28nm厚的电路板上。图9显示了目前MMIC的发展过程。在24GHz频带范围内的最新研发成果是A431块,它包含了一个发射器和三个接收器。图中的26GHz基带元件则主要是为美国市场而开发的。

图9:MMIC路线图
路线图展示的77/79GHz零件中,A770/A772目前还处于研发阶段,而图10框图中的A770MMIC收发器已经是一个高度集成的产品了。

图10:A770MMIC收发器
A770是一个单片集成收发器,包括了三个发射器、四个接收器、一个可调的锯齿波发生器,一个集成的ADC(Analog to Digital Converter模数转换器)和一个MIPI CSI II 接口。当需要更多发射和接收通道时,这一模块甚至可以被级联起来。模块被封装在9mm*9mm的陶瓷EWLB(Embedded Wafer Level Ball Grid Array内嵌式晶圆级球栅阵列)中,可以被用于中程和长程探测。
目前在进行可行性研究的雷达传感器是一个单片片上系统,同时集成了雷达和基带传输功能。如同之前所说的,目前意法半导体正在研究极高的集成状态下原始数据雷达传感器的各个细节和可能存在的缺陷,也在通过市场方面的研究探讨其商业上的相关问题。
激光雷达传感器
激光雷达是汽车领域相对较新的应用系统,但正愈来愈引起人们的注意。系统和半导体供应商们正专注于研发和改进新的解决方案,并计划2020/2021年将样件应用起来。
什么是LIDAR(激光雷达)?如前所说,它是利用激光进行探测和测距技术的简称。除了需要激光发射器,这一系统还需要有一个高精度的接收器。由于能通过独特的方法提供被探测物体的三维影像,激光雷达主要被用于测量与固定或移动物体间的距离。
如今,任何买了激光测距仪的人都在用这种方法在家中、建筑材料商店等地方测量距离,其能测量的距离可达数米。而对于驾驶员辅助系统,关键挑战则在于保证系统在任何环境状况下(温度变化、阳光照射、黑暗中或雨雪天气)都能正常工作,而且还要能辨认出300米以外的物体。当然,还需要能够体积最小,可以在最低的成本下大规模生产。
激光雷达系统不是新兴事物,也已经在工业和军事方面应用了很多年。但是,我们这里所说的是复杂的机械透镜系统,还要带有360度无死角视线,能捕捉到物体的空间三维影像。如果还像工业和军事上那样售价成千上万美元,那么将不可能被大规模运用在汽车领域。
如今,激光雷达系统有2个主要发展方向,红外激光雷达系统加上微电机械系统(MEMS Micro-Electro-Mechanical System)(配上转动的激光发射器),或者采用固定状态的激光雷达系统。
在简要地讨论这些技术的区别以前,需要对接收系统解释一下。
接收系统的主要功能是识别从发射器发出的和从物体上反射的光束。因此探测器需要非常灵敏,以至能够探测到单个的光子。如今,最新的相关设备采用了SPAD(Single-Photon Avalanche Diode单光子雪崩二极管) 技术。
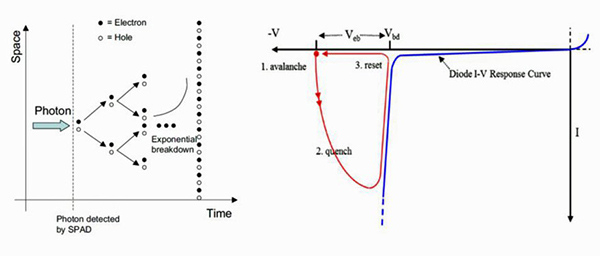
图11:SPAD 传感器单元的原理
该技术的原理很简单,如图11所示。这个二极管有特殊的偏移PN结结构,所以单个的光子就能在二极管内造成雪崩电流(由一点小电流引发的大量电流,类似雪崩现象,故名)。快速增大的二极管电流会被相应的电路探测到,然后产生数字信号,用于后期处理。
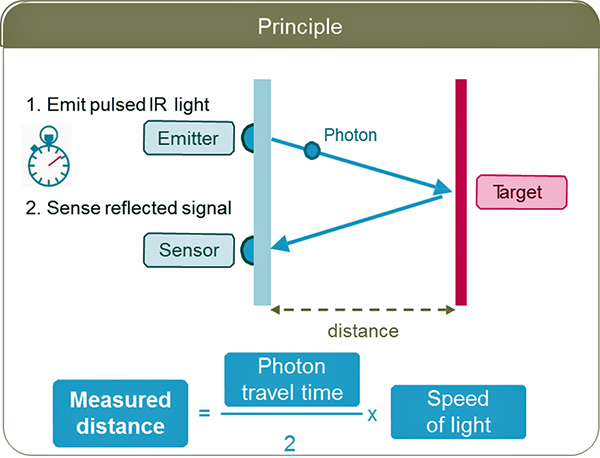
图12:激光雷达测距原理
图12显示的是采用SPAD传感器测量距离的工作原理。在时间为X时,激光发射器发出一个脉冲光信号,这一信号会被物体反射回来,经过Y时间后一个(或更多)光子到达传感器,到该物体间的距离可以从光线传播的时间长短计算出来。
如果一束或多束光线从转动的镜面或微型机械系统中发射出来,而又有一个由数个传感器元件组成的阵列,那么三维立体的物体也能被探测出来。图13和14就展示了两种基本的激光探测系统的测量过程。
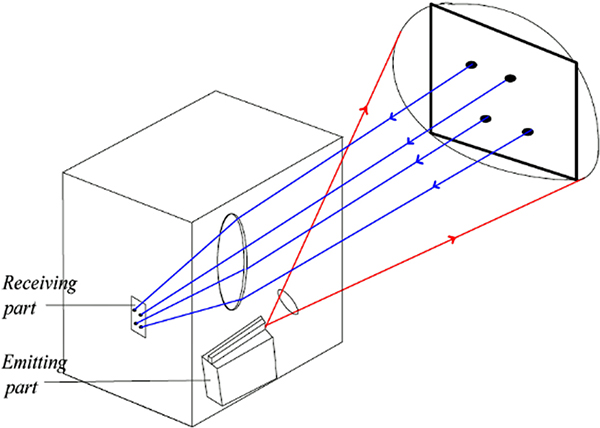
图13:固态激光雷达测距原理
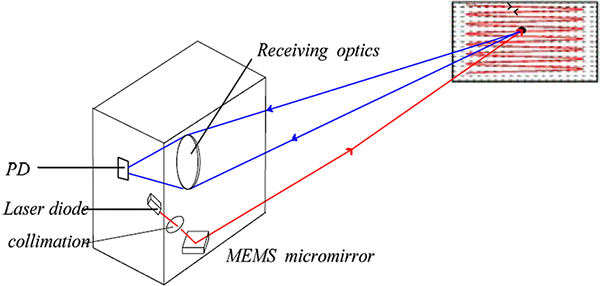
图14:基于MEMS的激光雷达测距原理
当采用基于MEMS技术的微型镜面系统时,单一束的激光信号会以线形形式被发散和反射回来,反射的光子被相对应的SPAD元件中的光敏传感器检测到。这对于镜面系统准确性、工作寿命、可调节度和可靠性有非常高的要求。毕竟这是一个内部带有可动部件的系统。
乍一看上去,一个没有可动零件的系统似乎更容易实现。但在这一系统中,需要数个(超过100个)激光二极管以及一个相对较大的接收器阵列。激光二极管必须能发出脉冲宽度在毫微秒级上的、电流达数个安培的信号能力,这对半导体制造商是很大的挑战。
两种系统都还在开发中。从一个半导体制造商的角度上来看,系统所需的半导体元件在技术上是可行的,但是SPAD阵列所需的空间面积不好实现。要想激活和控制激光二极管阵列,并实现大约100美元的目标成本,则需要新的方法。相应的微电机械系统也正在研发当中。
总结与展望
能保证L3及其以上无人驾驶功能的驾驶员辅助系统,至少需要三种传感器系统:摄像头、雷达和激光探测。每种传感器都应当有好几个,分布在汽车的不同位置上,共同工作。尽管如今已经有了所需的半导体技术和摄像头及雷达传感器开发技术,但激光雷达系统的发展情况在技术和商业问题上仍然是当前最大和最不稳定的挑战。
很难说我们讨论的哪一种系统会流行起来,但从半导体的角度,固态激光雷达系统的方法看起来似乎是最好的。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论