车顶自动涂胶中的视觉识别技术
视觉系统被称为自动化的眼睛,是模拟人类视觉在机器人上的体现的一个重要研究领域,它利用传感器获取的图像进行图像处理,能够识别出特征点或物体,在尽量短的时间内给出可利用的信息,以参与控制决策的产生。
在汽车制造业,视觉系统可广泛应用于涂胶、定位、识别、测量和缺陷检测等领域,视觉系统能够识别不同形状的车身零件、自动抓取所需的零件,视觉系统还能够通过扫描焊缝判断焊接质量,不合格的零件可自动下线。视觉系统的引入提高了生产的柔性和精益性,以及设备的智能化和自适应、自学习的能力。本文重点介绍了采用基于2D+3D双视觉系统的机器人自动涂胶系统,完成车顶导水槽无顶饰条的密封胶工艺。
密封胶工艺
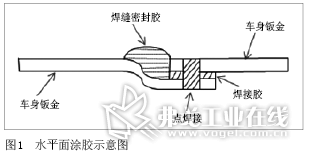
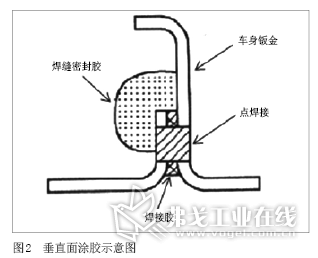
密封胶工艺是汽车涂装主要的工艺之一,是指在发动机盖、车顶和行李箱等车身各个焊接处均匀涂胶,使汽车车身具有很好的密封性(水密封、机械密封性)、防锈性、耐久性和舒适性。车身密封胶的涂布示例如图1、图2所示。
车顶导水槽由于车顶和侧围采用主流的分体式焊接方式,因此也要涂密封胶。目前国内外汽车产品的车顶导水槽涂胶主要采用以下方案:
1.密封胶+顶饰条
这是最主流的方案,特点是焊接工艺简单,饰条安装方便,但成本相对较高。
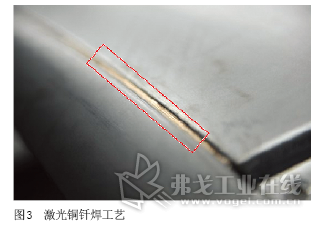
2.激光铜钎焊
仅在大众汽车的车型上应用较多,如图3所示。完成焊接后的车顶表面平整,无需再涂胶和安装顶饰条。特点是设备投资大,板材要求高。
3.无顶饰条工艺
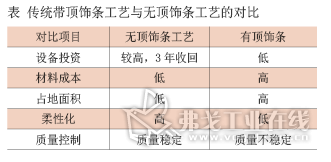
只在导水槽的焊缝处涂密封胶,不再安装顶饰条,如图4所示。这也是汽车行业新兴的工艺,省去了顶饰条,节约了成本,同时具备顶饰效果。

该工艺如果采用手工操作,无法保证涂胶质量的一致性和外饰的要求,因此多采用机器人自动涂胶系统,这也成为无顶饰条工艺的必然选择,其明显的优势是节省占地空间、柔性高,适用于多种车型共线生产,已在国内部分合资品牌的车型上取得成熟应用。传统带顶饰条工艺与无顶饰条工艺的对比如表所示。
系统组成及工作流程
本项目采用基于视觉系统的机器人自动涂胶系统完成车顶导水槽的密封工艺,系统主要由主控柜、机器人、2D视觉系统、3D视觉系统、视觉系统控制柜和带定量机的涂胶应用系统组成。导水槽自动涂胶系统如图5所示。
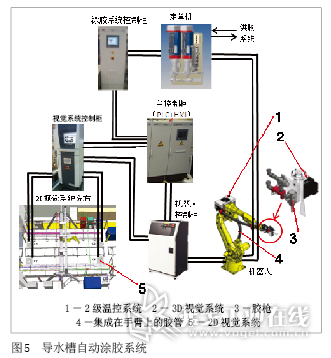
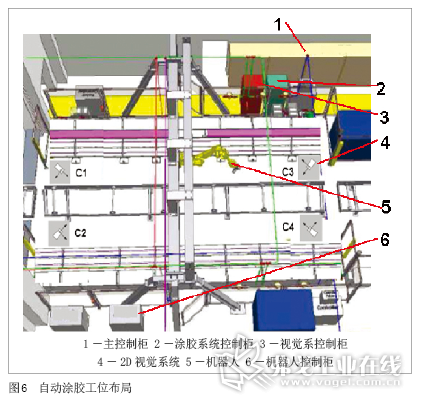
机器人安装在龙门架上,3D视觉系统、供胶管路和胶枪等集成在手臂上,2D视觉分布在工位的4个角落。涂胶应用系统采用定量机供胶,由伺服电动机控制,在机器人3轴处配有2级温控装置,以获得较高的施工稳定性。自动涂胶工位布局如图6所示。
系统工作流程为:车身到达涂胶工位后,2D视觉对车身进行定位;3D视觉根据车身位置对左右导水槽进行扫描,确定偏移量,将补偿值发送机器人;机器人修正轨迹,对导水槽进行涂胶。
工艺要求
该密封胶作为I区(用户可视)外表面,报交质量要求高:胶条表面必须光滑,无折皱或波纹,左右导水槽胶条宽度均匀,高度、宽度允许偏差要求较高。施工完成后的密封胶截面如图7所示。

实现涂胶须经过车身2D定位、导水槽3D定位、轨迹偏差补偿到最终涂胶几个步骤,车身定位是利用视觉系统捕捉车身特征孔,实现对车身X/Y方向上的偏差计算,由于车身制造、雪橇以及机运的累积误差,导致每个车身到达工位后与基准车身位置不一致,在此处导水槽包含在车身内,作为一个整体对待,这一步可称为初定位,需要让3D相机获得车身位置和导水槽的初步位置,通常精度为±3 mm。
第二步是对导水槽进行X/Y/Z方向的3D扫描,也是最为关键的一步。3D扫描能够获得导水槽的空间轮廓,但基准点的选择、智能算法的运用决定了能否为轨迹补偿提供合理的参考值。由于导水槽本身长达1.7 m,如果作为一条轨迹考虑,易造成胶条成正弦波形状或往一边偏移。而分段法将导轨分为3段,根据段内特征点偏差,计算得到统一的补偿值,随后再将3段连接起来分析,得到一个最终的补偿值,满足了最终的外观质量要求。
关键设计
1.车身焊接质量及尺寸需求
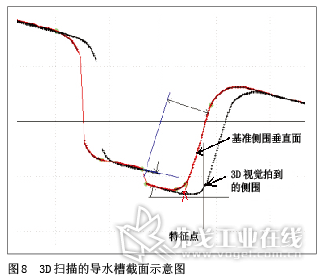
为满足质量要求,作为基材的白车身尺寸及表面质量也要达到一定的标准,由于行业内还无经验可参考,只能根据报交质量标准倒推,并在调试过程中不断完善补充。我们总结的白车身尺寸与表面质量的要求包括以下几点:焊缝到侧围垂直边的距离不超过9 mm;涂胶轨迹参考的特征点精度参考值为±2 mm,如图8所示;侧围翻边的水平面和垂直面有良好的平整度;导水槽底部表面干净,无飞溅、焊渣,无刮痕,无锯齿状焊缝缺陷;导水槽焊缝不允许有气孔和焊穿产生的洞。
2.视觉系统补偿策略
(1)2D视觉定位策略
车身在焊接时产生偏差,同时车身在承载工具上的位置误差和进入工位的定位误差都将使每个车身位置的相对基准有不同程度的误差。对于同一种车身,只需示教一次,示教的车身位置为基准位。
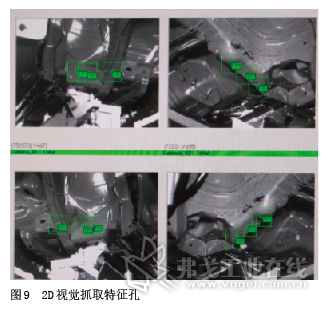
2D视觉系统由分布在工位4个角落的相机组成,对车身上预先设定好的特征孔拍照并进行图像捕捉,再对比基准照片,由于照片都由像素单元组成,因此像素值的差值就计算出特征孔在Cam相机坐标系X、Y方向上的偏差,以及绕Z轴的旋转角度R,由此得到特征孔的Cam坐标(见图10)。
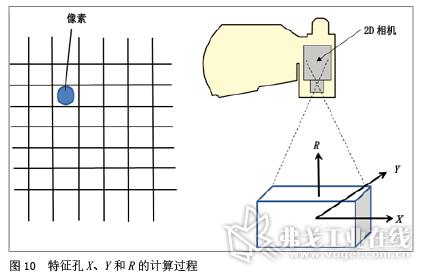
特征孔、车身以及2D视觉相机都处在World世界坐标系中(通常设在工位的某个固定点),特征孔同时也在2D视觉相机的Cam坐标系统中,Cam与World的转换矩阵在标定时已知,通过以下公式得到特征孔在World中的坐标:
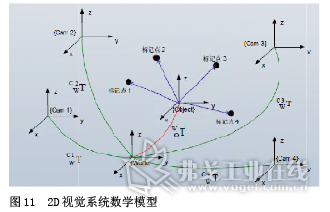
三点决定一个平面,通常选取前3个标记点计算车身位置,第4个标记点作为备用。根据内部换算程序,得到车身在X、Y和R在World坐标系中的坐标偏差。通常选取车身前轮轴中点作为车身坐标系的原点。图11中,标记点即特征孔,Object即车身坐标系原点。
(2)3D视觉定位策略
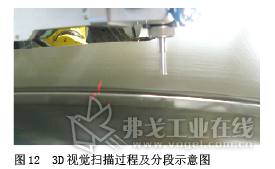
3D视觉系统也需要示教,以得到导水槽基准位。在2D视觉得到车身整体位置偏差后,3D视觉也同时获得了导水槽空间位置,并开始对导水槽进行扫描,整个导水槽被分为若干段,当视觉系统经过设计的数据点时,视觉系统发射一束激光,系统接收到反射光后得到导水槽横截面图像及距离数据,横截面图像如图12所示。
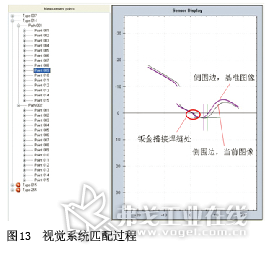
视觉系统匹配过程如图13所示。通过距离及图像抓取到特征点的空间坐标,14个特征点在系统中虚拟连接即获得导水槽在空间的三维模型,与基准匹配后,获得偏差值,机器人根据该值修正涂胶轨迹。
结语
本项目实施的意义在于:为国内汽车行业引入无顶饰条工艺提供了方案参考;视觉系统与涂胶装置集成在同一台机器人手臂上,降低了设备投资;3D视觉系统采用特殊的分段扫描策略,提出了一种新的定位方式。
经过补偿设置的不断调整以及车身尺寸的逐渐改观,胶条宽度及表面质量趋于稳定,合格率在98%以上。目前,该系统已投入大批量的生产中。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖