三维实时在线涂胶检测技术分析
涂胶工艺在汽车制造业中的应用日益普及,随着消费者对车身轻量化及燃油经济性需求的不断攀升,轻质材料(如铝合金)越来越多地使用到汽车车身和底盘上。薄体铝合金件本身的焊接难度比较高,与其他材质(如钢材)的焊接难度会更高,如何让两种材质完美粘合一直是行业难题,这就是为什么结构胶的使用日渐成为行业趋势的原因。在实际应用中,胶量及正确的涂胶位置对整车结构强度的影响至关重要,在汽车动力总成及总装车间,会使用适量的密封胶以确保充分密封。一流的涂胶系统通常会配备流量计或定量计来计算胶体总量,但是此类方式并不能显示具体的涂胶量、涂胶位置及涂胶面的状态,同时在涂胶过程中,以下因素也会对胶体质量产生影响:胶体粘度变化、胶体(或环境)温度变化以及胶桶替换产生的气泡等。综上所述,在生产过程中引入直观的三维在线涂胶检测技术是非常有必要的。
在线检测涂胶的解决方案
基于胶体本身的特性(涂抹节拍,凝胶不宜接触等),实时在线非接触式视觉检测是最适合的涂胶工艺品质控制解决方案。目前市面上主要有二维和三维两种在线检测涂胶的解决方案,前者是基于二维图片的对比度(颜色或灰度差异)来获取胶体位置等信息,此种检测方法有一定的局限性:首先,只能获取二维信息即胶体宽度,而对于胶体功能特性真正相关的胶体横截面积信息(结构胶的挤压扩张和FIPG的密封)等则不能获取到;其次,在实际生产环境中,二维视觉易受到被测件颜色及环境光的影响,其误判率非常高。此外还有一些错误模式是二维相机不能识别的,例如涂胶过程中被测件抖动或机器人路径规划不佳时,胶枪有可能会刮擦到零件表面留下一层薄薄的胶体印记(但其实涂胶量不足),导致二维视觉系统误判,产生不合格件。
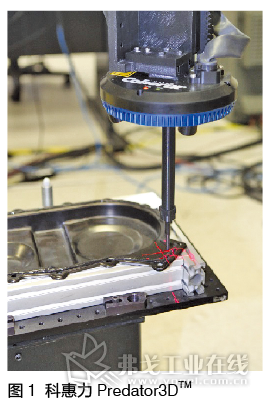
鉴于上述二维检测的局限性,三维涂胶检测已逐渐成为行业趋势,种类繁多的三维传感技术应运而生:激光三角测量法、立体视觉、结构光测距方法、飞行时间法3D成像(飞行时间测距法)和激光干涉测量等。其中,激光三角测量最能满足实时在线连续高速成像的要求,然而胶枪四周空间的局限性以及喷涂方向的任意性,导致通用的单条激光线传感器不能满足检测需求。一种解决方案是电动机驱动单条激光线来旋转跟踪喷嘴的轨迹,不过现代的涂胶过程速度可高达400~1 000 mm/s,在如此高速下,很难可靠保证电动机能充分快速地响应涂胶方向的突变;另一种解决方案则是在喷嘴四周配置多条激光线(如科惠力Predator3D),这种设计方案可以确保喷嘴任意方向均没有视觉盲区。科惠力Predator3DTM如图1所示。
科惠力Predator3D的显著优势
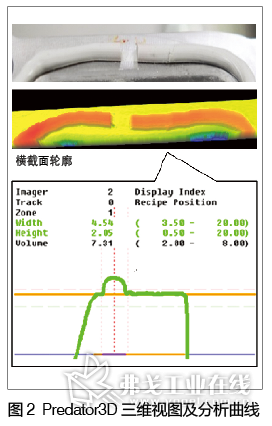
科惠力Predator3D实时在线涂胶检测技术的实现使一次行业的变革成为可能。基于此项技术,产品研发人员能直接设定与胶条功能特性相关的公差要求;制造工艺人员能更好地控制生产过程以及优化涂胶工艺。Predator3D三维视图及分析曲线如图2所示。
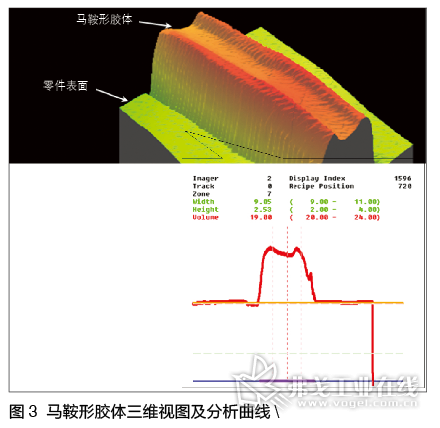
某客户涂胶过程中曾出现过这样的情形:由于零件装夹等因素导致在涂胶过程中部分位置胶枪与零件表面的距离过近,从而发生胶枪犁过胶体表面,致使胶体横截面呈马鞍形(即两侧高,中间低),整个胶体中部形成一个沟槽。这可能会导致不充分的湿胶扩散,从而引发车身强度(安全性)的严重担忧。对于这种马鞍形的胶体形态,传统二维视觉系统常用的胶宽参数无法将该零件从合格件中剔除出来,甚至三维的胶高参数也无能为力,这就是我们通常说的误判。科惠力Predator3D实时记录并检测胶体的全三维信息,可以根据胶宽、胶高以及胶体的瞬时体积等参数对涂胶过程进行多重质量把控,对于这种马鞍形的胶体形态,Predator3D可以通过胶体的瞬时体积公差将此类零件剔除出来。Predator3D为该客户挽回了一次大范围的质量滑坡事件,并节省了上千万美元的潜在费用。Predator3D马鞍形胶体三维视图及分析曲线如图3所示。
此外,产品所需的安装空间小、与机器人及涂胶设备的兼容性高、对机器人编程复杂程度的增幅小、涂胶速度改变的适配性高、工厂环境使用的强健度高、数据可追溯性以及安装使用难易程度等也是三维实时在线涂胶检测技术实施时需要考虑的因素,科惠力Predator3D在这些方面均有成功的现场案例。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖