英法大学合作重建复杂3D场景信息 赋予无人驾驶汽车远程传感能力
据外媒报道,英国苏格兰赫瑞瓦特大学(Heriot-Watt University)的研究人员与法国图卢兹大学(University of Toulouse)的研究人员合作,提出了一种新框架,能够将统计模型与计算机图像界中可高度扩展的计算工具相结合,以实时(50帧/秒的速度)提取精确的3D信息。
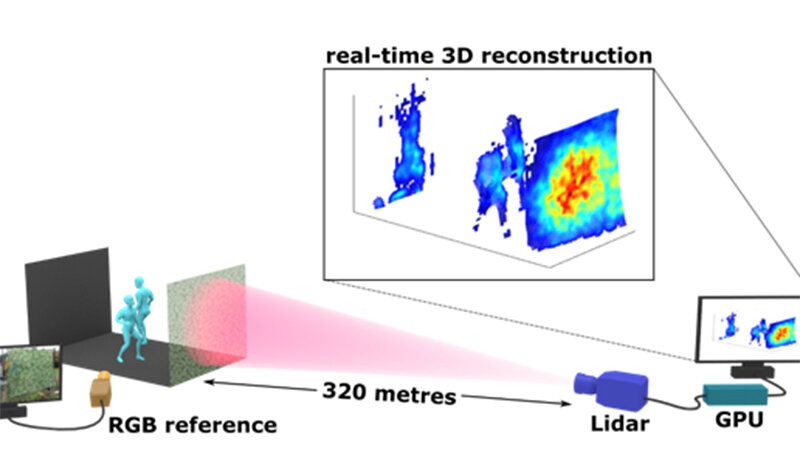
(图片来源:赫瑞瓦特大学)
该新方法可以在杂乱的场景中探测目标,并形成图像,能够实时对复杂移动场景进行目标重建,并为汽车远程传感(下一代无人驾驶汽车的关键功能)所需的传感技术提供先行技术。重建3D场景技术可用于各种重要应用,如自动驾驶汽车、环境监测和国防等。
其中一位研究人员,工程与物理科学学院的院长Stephen McLaughlin表示:“能够实时重建3D视频,可实现汽车远程传感技术,这也是下一代无人驾驶汽车的一项关键功能。”
目前,最近几代的汽车都采用基于激光的雷达或激光雷达技术,以测量车辆与邻近车辆或其他潜在障碍物的距离。
赫瑞瓦特大学率先采用先进的时间相关单光子计数激光雷达(time-correlated single-photon counting lidar)法,使用对眼睛安全的激光源,而且识别远距离(数百米到上千米)物体时具有良好的分辨率。
最近,该项技术被用于在雾中、目标杂乱、水下介质高度散射或距离大于10公里的自由空间等极端环境下,成功重建了高分辨率的3D图像。
不过,到目前为止,一个最主要的障碍就是分析此类收集而来的数据需要大量的时间。从单个定时单光子探测事件中恢复3D信息是一项极具挑战性的任务,需要大量的图像处理算法,此前的方法在处理单个激光雷达帧,或者对场景采用限制性假设,以恢复场景时,需要几十秒,甚至几分钟,阻碍了3D成像的实际应用。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论