自动泊车系统APS
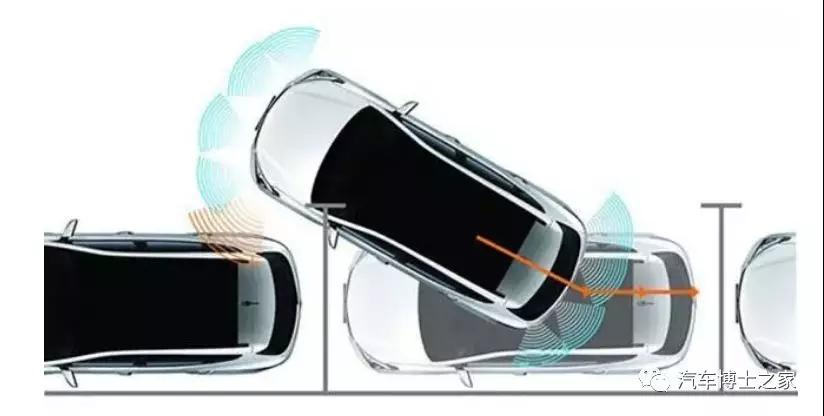
自动泊车系统(Automatic Parking System,简称APS)是一种通过探测车辆周围环境信息来找到合适的泊车位,从而控制车辆的转向和速度,使得车辆能够自主驶入泊车位的系统。
1.系统工作原理
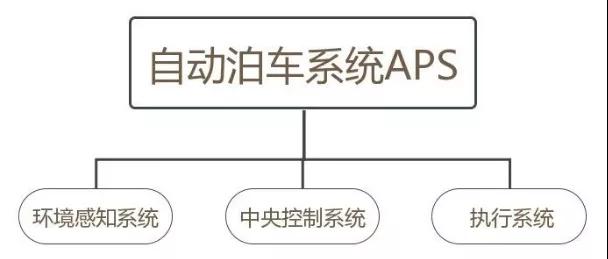
和大多数智能系统一样,自动泊车系统的运作也是离不开各种子系统的协同工作的。APS主要由三大子系统组成。
环境感知系统
该系统的主要任务是探测环境信息,如寻找可用车位,现在泊车过程中实时探测车辆的位置信息和车身状态信息。在车位探测阶段,采集车位的长度和宽度。在泊车阶段,监测汽车相对于目标停车位的位置坐标,进而用于计算车身的角度和转角等信息,确保泊车过程的安全可靠。

中央控制系统
该系统为APS的核心部分,主要任务是接受传感器采集到的信息,计算车位的有效长度和宽度,判断车位是否可用;规划泊车路径,根据停车位和汽车的相对位置,计算最优泊车路径,并生成相应的控制命令。
执行系统
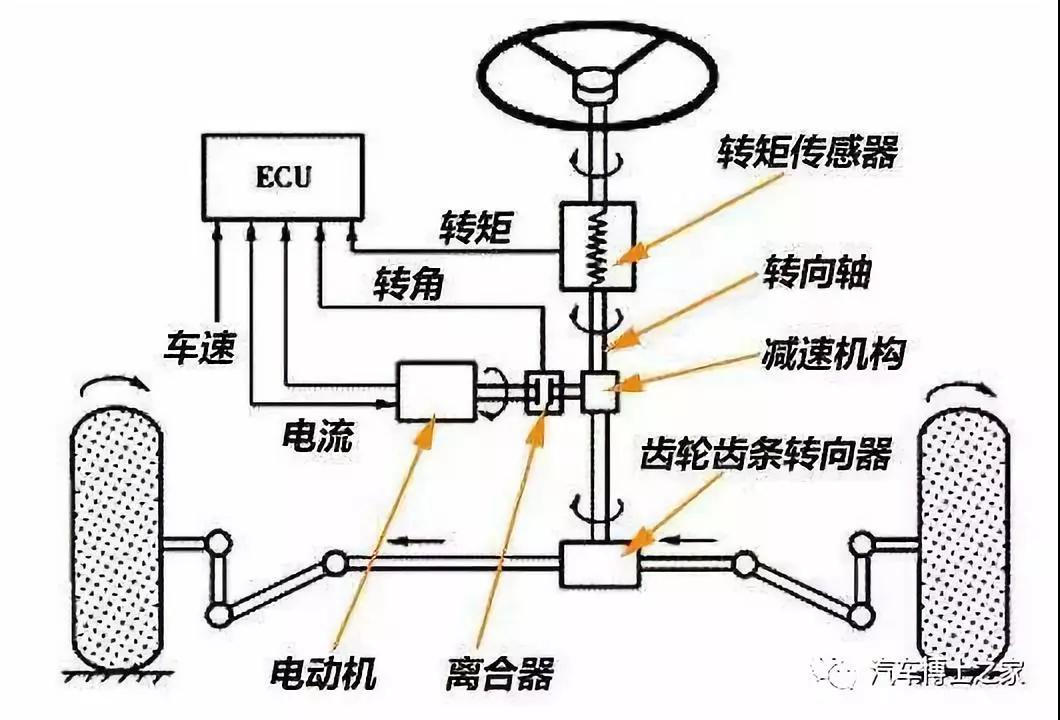
该系统主要包括电动助力转向系统和汽车发动机电控系统。根据中央控制系统的决策信息,电动助力转向系统将数字控制量转化为方向盘角度,控制汽车的转向。汽车发动机电控系统控制汽车油门开度等,从而控制汽车泊车速度。两者协调配合按照制定命令完成泊车过程。
原理探究
整个系统的工作流程可以简化为三步,分别由三个子系统来完成:

1.感知
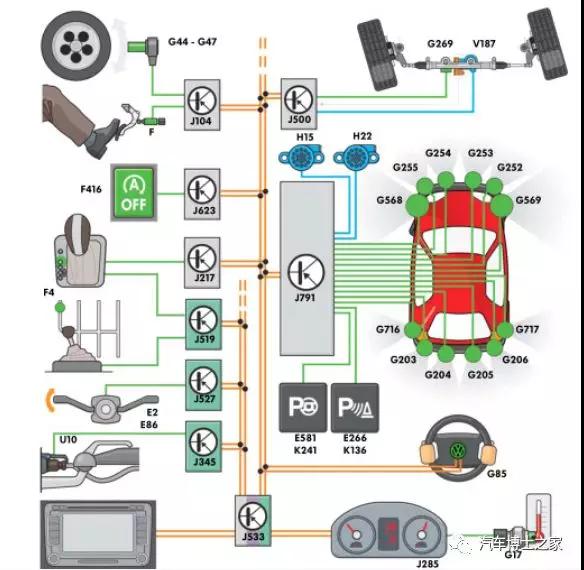
首先,环境感知系统通过超声波传感器、雷达、摄像头、陀螺仪等设备采集汽车位置信息和车身状态信息,并将其转化为数字信息。
2.决策
随后,中央控制系统接收这些环境信息数据,分析处理得出汽车位置、车位位置以及周围环境的参数,再经过提前编写的算法程序的处理,规划泊车路径,生成相应的控制命令(包括车速命令和方向盘转角命令等)。
3.执行
最后,执行机构收到控制命令,依据指令控制电动助力转向系统(Electric Power Steering,简称EPS)控制方向盘转动,同时控制发动机电控系统控制行驶速度,根据规划好的路径使汽车停车入位。
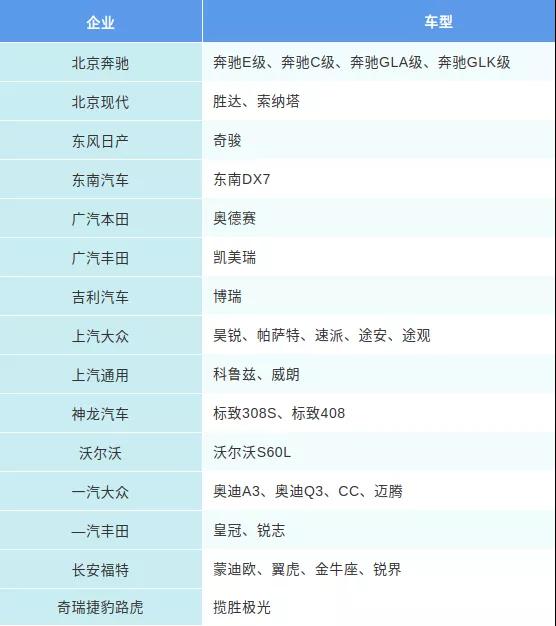
限于成本和技术尚不完善,国内目前自动泊车系统一般安装于中高级车型。
目前,市面上的自动泊车系统一般仍为半自动泊车,还需要驾驶员的介入(例如通过油门和刹车对车速进行控制)。不过随着目前汽车智能化研究如火如荼的发展和进步,相信不久之后将会诞生更为便利的全自动泊车系统。
2.超声波感知技术探秘
经过上期对于自动泊车系统(APS)的介绍,相信大家对于这套系统的工作原理已经有所了解。在接下来的文章中将会分别对APS三大系统中应用的技术进行介绍,让大家对于APS有更加深刻、全方位的认识。
环境感知系统在APS中起着搜集环境信息的作用,相当于汽车的“眼睛”和“耳朵”。
超声波传感器是感知系统中重要的一环,它可以准确地测出车辆与周围物体的距离信息, 协助其他感知设备生成汽车的位置信息。
为什么超声波能够测距?
超声波传感器如何产生和接收超声波?
距离信息又是怎样生成的?
超声波测距有哪些局限性?
让我们来一探究竟吧!
为什么超声波能测距?
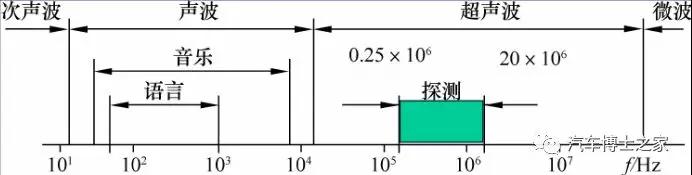
超声波是机械波的一种,频率高于20kHz,超出人耳能够听到的声波的频率范围。
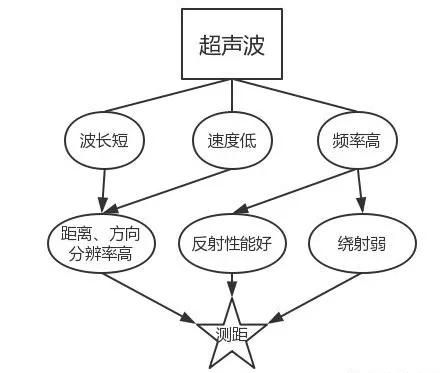
超声波能用于测距是由其物理性质决定的。超声波反射能力强、方向性好,使其成为测距的理想选择。
蝙蝠等一些无目视能力的生物利用超声波作为防御天敌及捕获猎物的生存手段,这些生物体一方面发射超声波,一方面接收猎物或障碍物的反射回波,根据时间间隔及强弱,判断猎物的性质或障碍物的位置。
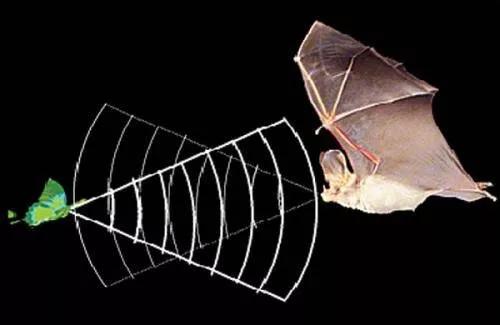
同理,人类利用超声波传感器进行测距也是可以分为三个过程:
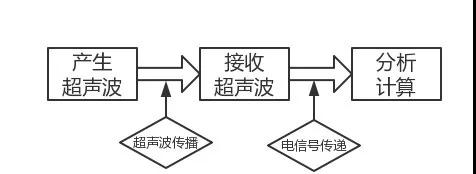
超声波传感器如何产生和接收超声波?
目前最常用的是压电式超声波传感器,它是利用压电晶体的共振来工作的。
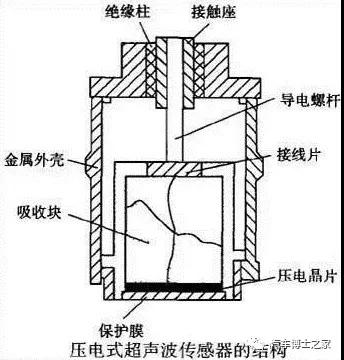
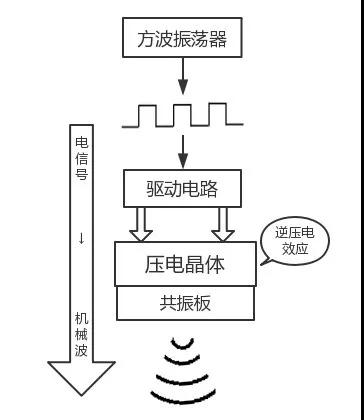
该传感器有两个压电晶片和一个共振板,当其两极外加脉冲信号,且频率等于压电晶片的固有振荡频率时,根据逆压电效应,压电晶片将会发生共振,并带动共振板振动产生超声波。
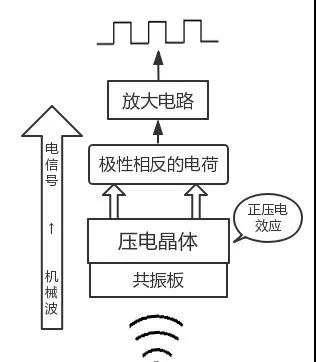
反之,如果两电极间未外加电压,当共振板接收到超声波时,将迫使压电晶片振动,根据正压电效应在晶片的两个表面上便产生极性相反的电荷,将机械能转换为电信号,这些电荷被转换成电压经放大后送到测量电路,最后记录或显示出来,这时它就成为超声波接收器。
本文介绍的是同一个传感器兼作发生器和接收器,一些超声波传感器也会将发生器和接收器分开,但两者的结构基本相同。

距离信息是怎样生成的?
目前将传感器信号转化为距离信息的方法有三种。
相位检测:通过测量发射端与接收端信号之间相位差来实现测距,其精度虽高,但实时性差,计算复杂。
幅值检测:超声波在空气中传播时其振幅是按比例不断衰减的,通过测量所发送和接收的超声波振幅差,以此来计算出传播距离,这种测距方式受环境影响大,测距精度不足;
时间渡越检测:测量超声波发出到接收的时间差t,就可计算目标障碍物距信号发射源的距离d,这种方法容易实现,并且精确度高。计算公式为:
d = vt /2
其中,v为超声波波速( m /s)。
超声波测距有哪些局限性?
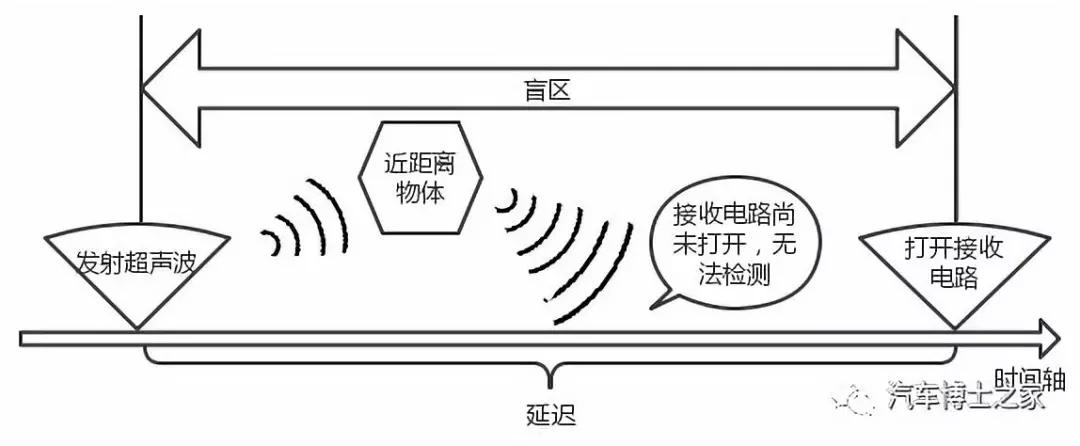
①有测量盲区
超声波传感器发射信号后,压电晶片存在一定的余振,如果这时立即打开接收电路,余振会引起误判断。因此一般发射信号后会延迟一段时间再打开接收电路,这段延迟时间就导致了测量盲区的产生。
②测量精度易受环境影响
超声波的传播速度受温度、压力、湿度等环境因素的影响而变化,其中温度的影响最为明显,温度每升高1℃,声速增加约0.6m/s。因此为了保证测量精度,必须经常对声速进行校正。
③测量距离有限
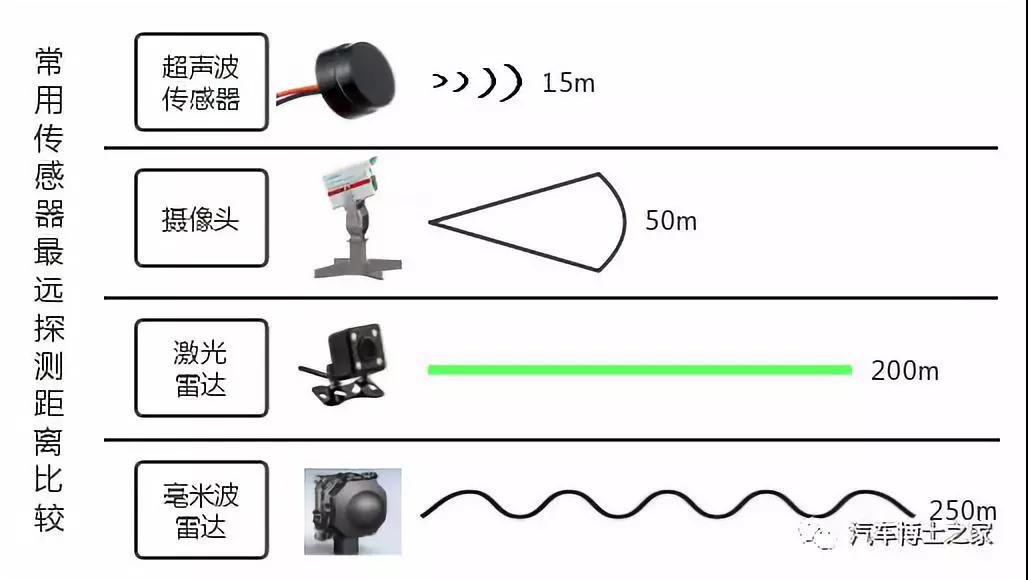
超声波接收器受到的回波信号的强度会随测量距离的增大大幅降低。受超声波发射功率和损耗的限制,目前国内超声波传感器的最大测量距离一般不超过15m。
不同于激光雷达、摄像头识别系统等感知元件,超声波传感器价格低廉。大家可以购买一个超声波探头,配合单片机,自己就能制作一个简易超声波感知系统。













![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论