CAN总线信号的分析功能
CAN总线是德国Bosch公司为汽车电气控制系统开发的一种有效支持分布式控制和实时控制的串行通信网络,随后Philips、Intel、Motorola等半导体制造商又相继开发了支持CAN总线协议的集成器件,如82526、SJA1000、68HC05X16等等。由于CAN总线具有较强的纠错能力,支持差分收发,因而适合高噪声环境,并具有较远的传输距离。
CAN总线协议对于许多领域的分布式测控是很有吸引力的,特别适合于小型分布式测控系统。目前已经应用在乘用车、卡车、公共汽车的车体控制、动力系统、ABS、发动机控制等方面。除此以外,CAN总线还在飞机、船舶、工业自动化、建筑物环境控制、机床、医疗设备等领域得到了较为广泛的应用。
现已成为ISO11898标准的CAN总线协议具有以下特性:
1、CAN总线可以多主方式工作。
网络上任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息,不分主从的通信方式十分灵活,利用这一特点也可方便地构成多机备份系统。
2、网络上的节点(信息)可分成不同的优先级,能够满足不同的实时要求。
3、采用非破坏性瞅瞅技术。
当两个节点同时向网络上传送信息时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响继续传输数据,大大节省了总线冲突的裁决时间。最重要的是在网络负载很重的情况下,也不会出现网络瘫痪的情况(以太网则可能)。
4、可以点对点、一点对多点(成组)及全局广播几种传送方式接收数据。
5、直接通信距离最远可达10km(速率5kB/s以下)。
6、通信速率最高可达1MB/s(此时距离最长40m)。
7、CAN总线上的节点数实际可达110个。
8、采用短帧结构,每一帧的有效字节数为8个,传输时间短,受干扰的概率低,具有极好的检错效果。
9、每帧信息都有CRC校验及其他检错措施,保证了极低的数据出错率。
10、通信介质采用廉价的双绞线即可,无特殊要求。

11、CAN总线节点在错误严重的情况下,具有自动关闭总线的功能,切断它与总线的联系,以使总线上的其他操作不受影响。
12、NRZ编码/解码方式,并采用位填充技术。
CAN总线信号分析功能
使用CAN总线进行通信,连接后如果超负荷就会引起电压的变动,而对电压变动引起的故障进行分析时则需要对CAN总线物理层进行分析。如果使用CAN总线协议分析仪,因为独立进行测量,很难进行同期观测。故障发生后,无法锁定故障,分析故障位置和错误信息,以及哪个控制器出现错误。
因此,在故障分析时需要技术人员一个个去查找,需要花费大量时间。横河电机的数字示波器配备着CAN总线数据分析功能,主要有以下几个系列产品:
● DL1600系列,带宽200MHz,最大记录长度8MW/CH,重量3.9kg,配备CAN、SPI、I2C串行总线分析功能;
● DL7400系列,带宽500MHz,采样率2GS/s,4通道模拟输入,16位逻辑输入,最大记录长度16MW/CH,用户自定义运算功能,配备CAN、SPI、I2C串行总线分析功能;
● DL1700系列,带宽500MHz,最大记录长度8MW/CH,采样率1GS/s,USB存储接口(USB闪存、USB硬盘等),配备了CAN、SPI、I2C串行总线分析功能和HDTV触发。
CAN总线信号分析功能可以通过模拟波形显示CAN总线信号波形,并且可同期进行数据分析。另外,也可以同期观测CAN总线上的数据和模拟波形。
CAN总线信号分析功能大致可以分为以下4个方面:
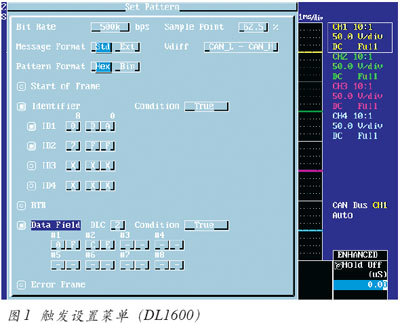
1、触发功能
将CAN总线中的特定帧和领域设置为触发条件并捕获CAN总线信号波形。触发条件具体可设置为:
(1)SOF(Start of frame)
(2)Identifier Trigger
● 可选择标准或扩张数据格式;
● 可指定4种地址或条件设置触发;
● 可选择True/false条件。
(3)RTR Trigger
● 远程发送请求
(4)Data field Trigger
● 可指定1~8位数据长度
● 可选择True/false条件
(5)Error Frame Trigger
● 错误帧触发检查方式另外使用与条件(AND)可在特定的Identifier(标示符)和Data Field(数据领域)存在的帧内设置触发。CAN总线信号触发条件可以和CH2-CH8(DL7440为CH2-CH4)的平行模式相组合设置触发。DL1600的触发设置菜单如图1所示。
2、 分析功能
对捕获到的CAN总线信号数据进行分析时,可在显示列表中以每一帧的格式显示Identifier(标示符)、DataField(数据领域)及Acknowledge的数值。在分析结果列表上,可自由选择数据帧,并且同期自动显示对应该帧的CAN总线信号,通过详细分析结果列表可确认帧种类和错误种类等比较详细的故障分析结果。这些详细分析数据,可以ASCⅡ数据的格式保存到外部存储媒介。另外,CAN总线分析功能还可从CAN总线信号中检测到位添充波形,并可以运算波形显示。除此以外,数据帧、RTR(远隔帧)以及错误帧也可以作为故障分析对象。DL1600的分析结果显示菜单如图2所示。
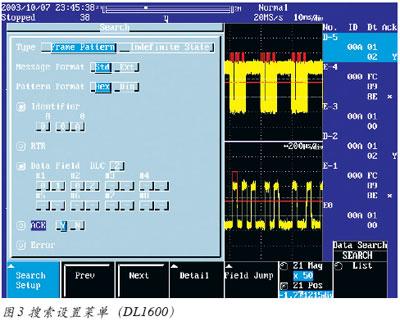
3、 搜索功能
在完成CAN总线信号数据分析之后,可检索与特定帧或领域模式相一致的数据,并显示目标波形,也可以检索包含错误帧或错误数据的帧。检索完成后,可以显示该结构内所指定领域的开始部分。使用该功能,可瞬时显示该帧的内部目标领域。DL1600的搜索设置菜单如图3所示。
4、光标功能
可将两根光标间隔设置为比特时间,即比特率(数据传送速率)的倒数,光标可以每1比特时间左右移动。在进行数据分析/搜索时,计算比特数的同时,确认CAN总线信号领域/帧。
CAN总线通信在EV电控系统开发中的应用
在 EV电控系统中,CAN总线通信建立了各控制器之间的通信网络,实现了各控制器之间以及与仪表盘的信息互通。通过开发的在线标定系统和监测系统,在PC机上可以实时监测各控制器的参数。CAN通信数据传输速率为500kbit/s,利用CAN总线通信设计的镍氢电池实时监测系统获得充放电特性曲线,实时反映镍氢电池充放电的特性。
CAN总线作为一种可靠的汽车计算机网络总线已开始在先进的汽车上得到应用。各汽车计算机控制单元能够通过CAN总线共享所有的信息和资源,达到简化布线、减少传感器数量、避免控制功能重复、提高系统可靠性和可维护性、降低成本、更好地匹配和协调各个控制系统的目的,使得汽车的动力性、操作稳定性、安全性都上升到一个新的高度。
随着汽车电子技术的发展,具有高度灵活性、简单的扩展性、优良的抗干扰性和处理错误能力的CAN总线通信协议必将在汽车电控系统中得到更加广泛的应用。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论