车辆导航定位仿真试验系统研究
副标题#e#
随着信息化汽车的发展,卫星全球定位系统()的应用将会迅速增加。该系统不仅可实时提供车辆所在位置、行驶速度和时间,还具有防盗功能,为驾驶员提供车间通讯以及最新交通信息,以便保障行驶安全和道路畅通。目前,目标定位技术有独立定位、地面无线电定位和GPS卫星定位三种。独立定位的最大缺点是误差累积效应,其定位精度会随定位过程的进行不断下降;地面无线电定位受地面障碍物的干扰,产生的信号衰减和多径效应明显,造成定位精度下降或失效;GPS 定位系统是美国研制并建立的新一代精密星基无线电导航系统,具有全球地面连续覆盖,功能多,精度高的特点,因此GPS技术有广泛的应用价值和发展潜力。 GPS试验可以模拟真实的卫星定位,得到离线实验所需要的虚拟定位数据,对实验教学、车辆虚拟驾驶的研究等具有重要的意义。
l GPS导航原理及其应用
1.1 GPS导航原理
GPS是由设在加州洛杉机空军基地(AFB)的美国空军系统司令部空间分部下属的联合计划办公室(JPO)负责研制的。1973年,JPO在美国国防部 (DOD)的直接领导下,开始制定方案、研制、试验和布设一个卫星全球定位系统。当今,具有定时和测距能力的导航系统(NAVSTAR)——全球定位系统 (GPS)就是最初的系统方案。GPS可以看作是一种从空间位置己知的卫星到位置未知的陆、海、空和近地空间用户的测距系统。实际上,卫星信号本身的发射时间带有一个明确的标志,因此采用同步工作的接收机接收该信号时便可测量出信号的传播时间。除点定位外,确定载体的瞬时位置、速度和精确时间是GPS最基本的功能。GPS系统于1993年建成并投入使用。GPS由空间卫星星座、地面监控站和用户设备三部分组成。用户设备主要指GPS接收机。卫星导航定位系统是在己知卫星在每一时刻的位置和速度的基础上,以卫星为空间基准点,通过测站接收设备,测定至卫星的距离或多普勒频移等观测量来确定测站的位置、速度。
1.2 GPS定位在车辆导航中的应用
交通运输领域一直是卫星导航定位系统最大的应用市场之一。随着汽车制造技术、现代化交通系统等的发展,基于GPS的移动目标监控技术逐渐成为汽车领域创新技术研究的方向之一。智能交通系统ITS就是这方面的具体体现。
城市交通是城市现代化的基础设施之一,如何合理地使用这一资源,提高物流车辆的营运能力和安全防范能力,减少交通阻塞和事故是城市建设现代化的一个重要标志,物流车辆调度系统就是为完成这一目标而设计的。该系统采用计算机技术、集群通信技术和信号处理技术等,可对运行的物流车辆进行统一管理,向用户提供各种优质服务,并对物流车辆进行科学管理和监控。另外,网内物流车辆遇到险情可随时向中心报警。这一系统的建设,在社会上产生了积极的反响,使城市的交通管理现代化再上新台阶。GPS定位监控管理系统可向公安110出警巡逻车辆提供切实可行的调度监控管理方案,大大提高了公安处警能力,实现了从前静态处警向动态处警的飞跃。
基于GPS的车辆定位和监控系统在公交车、出租车、物流、邮政快递以及私家车的监控管理方面有一定的实用价值,它为加强对车辆的管理,有效防止和打击车辆犯罪提供了一种可行的解决方案。
2 GPS仿真试验系统设计
仿真实验系统设计的主要核心包括卫星位置的计算、可见星的判断、最佳定位卫星选择、误差计算和定位解的计算等。
2.1 卫星位置的计算
GPS仿真系统不需要接收来自导航卫星的真实信号,取而代之的是通过已知卫星运动方程计算任一历元卫星坐标,从而确定卫星在车辆上空的分布情况,作为推算车辆位置的数据源。
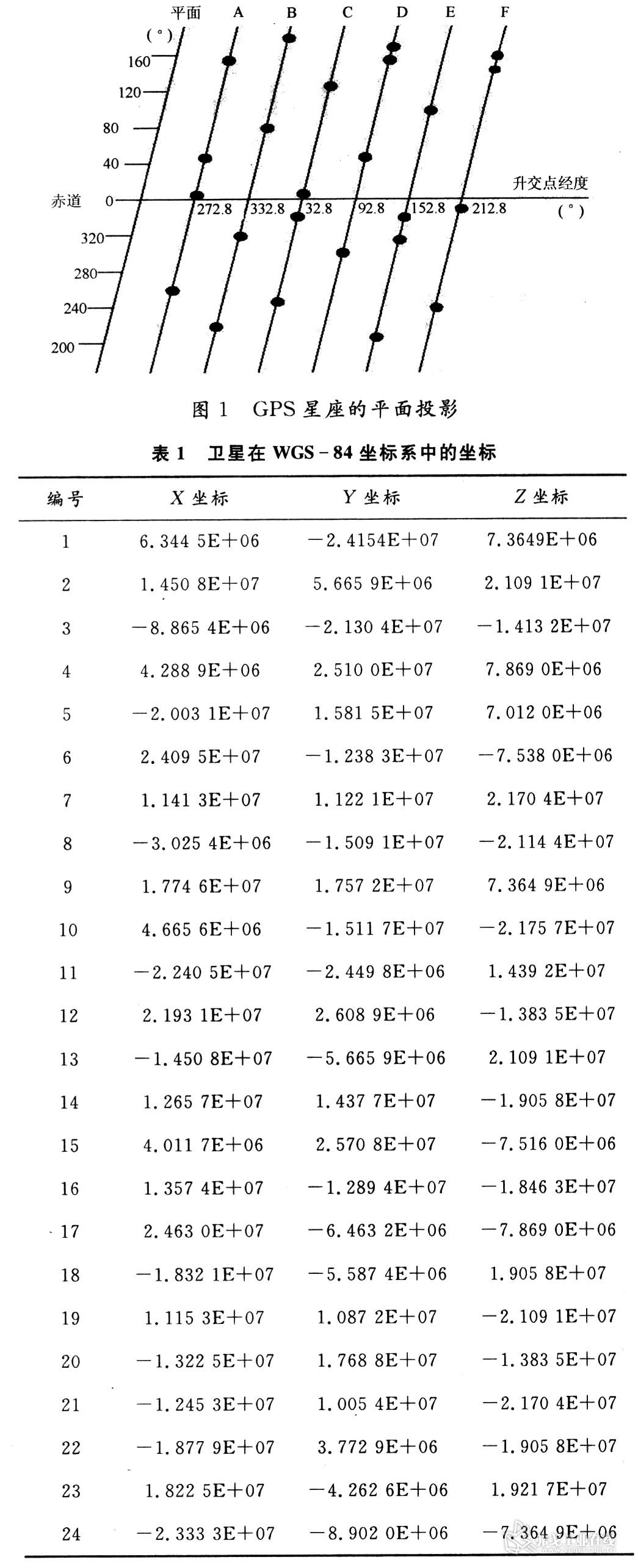
在仿真中,仅考虑地球引力对卫星的作用,而且还假设地球是一个质量均匀分布的球体,其质量集中于地球中心。该文在数据处理中没有考虑卫星在各时刻的摄动变化量,所以不能仿真高精度的轨道数据。但是为反映卫星的运动状态,使用电文中的历书数据作为计算的初始值,该仿真精度是足够的。图1是以UTC(US— NO)1993年7月1日O时的历元时间为基准,用平面投影表示的卫星轨道。采用图1所示时刻的卫星参数为仿真起点,利用Matlab的数据处理及仿真功能,通过编程可以实现对GPS星座运行的实时解算。建模过程中,卫星椭圆轨道的长半轴α取26 560 km,椭圆偏心率e取0.02。从图中可以形象地看出GPS卫星星座的空间分布及运动情况。
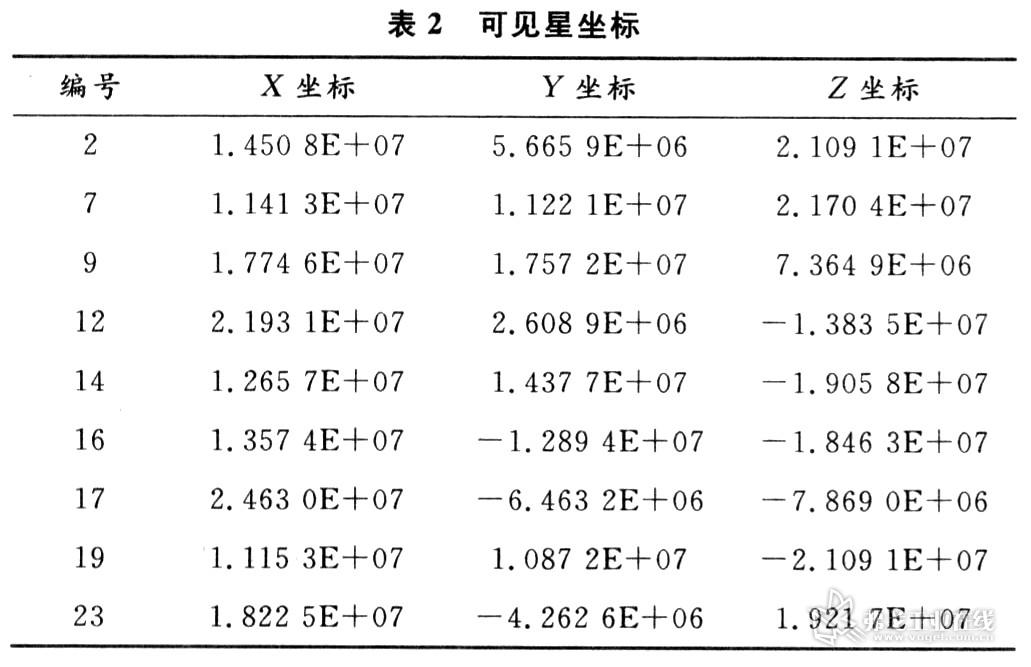
根据图1所示的GPS卫星系统初始数据,可得到2008年4月1日10:00:00时刻的卫星在WGS一84坐标系中的坐标,见表1。
#p#副标题#e#
2.2 可见星判断
卫星在空间运行时,并不是所有的卫星对用户都是可见得。通过可见星的快速判断,可以有效限定可视卫星的数目,从而缩小了卫星组合的遍历空问。在分析过程中除了考虑地球的影响外,还必须考虑到地面上建筑物或其他物体对信号产生的遮挡。另外,卫星仰角过低,产生的大气层延迟和多径问题的可能性较大,因此还必须引入遮蔽角。遮蔽角一般介于取最常用的5°~10° 。仰角的计算公式为:

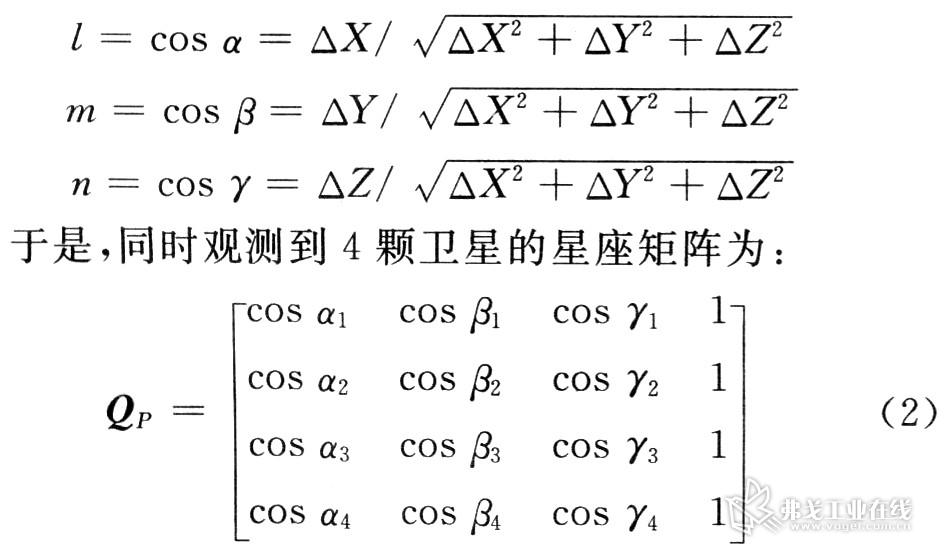
式中:R为地球的半径;H为卫星距离地面的垂直高度;φp,Lp分别为接收点的经纬度;φs为卫星的经度。设定E=7°,则在经度117°10'34",纬度36°42'47"和高程10 m处,可见星及其坐标如表2所示。
2.3 最佳定位星座的选取
人们利用进行导航定位时,用户与卫星的相对位置是影响其性能的因素之一。如何选用定位星座,通常利用几何精度因子GDOP来确定,即定位星座是由使GDOP值最小的GPS卫星组成的。
由卫星对地球和地面目标的覆盖特性可知,顶座星仰角越大,GDOP越小。所以最佳星座中必然包括仰角最大的那颗卫星。从以上分析可知,在选择最佳星座时,首先选取仰角最大的1颗卫星,然后从其他可见卫星中再任选3颗,共同计算4颗星组成卫星星座的几何精度因子值GDOP。如此反复计算,最后将各几何精度因子GDOP排序求得最小值,最小GDOP值对应的4颗星就是最佳星座的卫星组合。
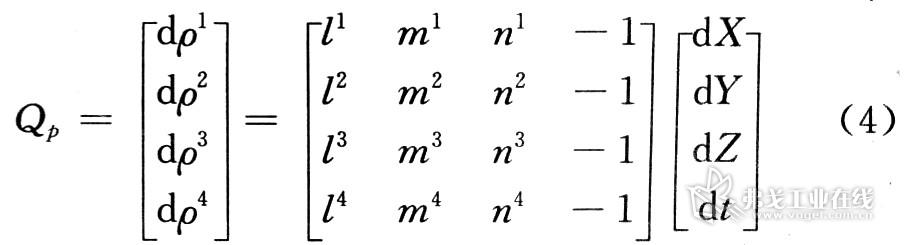
卫星星座GDOP的计算模型主要是以星座的状态矩阵为依据。这里采用最常用的方向余弦法。设α,β,γ分别为测量点到卫星的斜距与X,y,Z轴的夹角。令:
利用星座矩阵,计算GDOP如下:
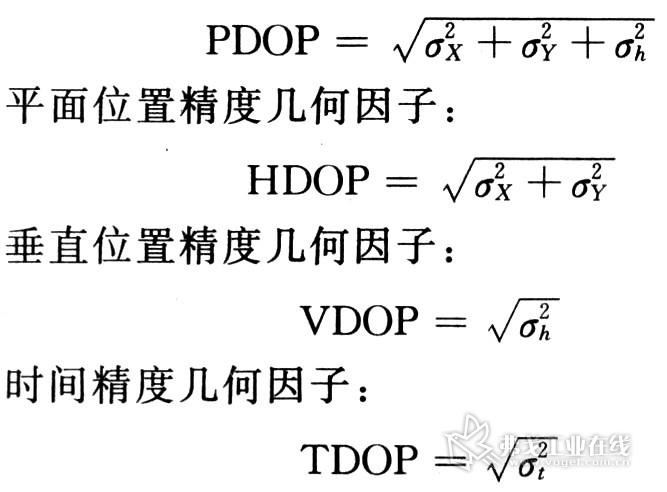
通过最佳定位星座的选取,得到定位精度最高的4颗卫星为2-9-16-17,其GDOP(几何定位因子)值为5.112 8;PDOP(位置精度几何因子)值为4.986 4;HDoP(平面位置精度几何因子)值为4.368 1;VDOP(垂直位置精度几何因子)值为2.405 0;TDOP(时间精度几何因子)值为1.129 8。
2.4 误差计算
GPS定位是通过地面接收设备接收卫星传送的信息确定地面点的位置,所以其误差主要来源于GPS卫星、卫星信号的传播过程和地面的接收设备。此外,在高精度的GPS定位中,与地球整体运动有关的地球潮汐、负荷潮及相对论效应等的影响,也是导致其误差的不可忽视的原因。
为了便于理解,通常将各种误差的影响投影到观测站至卫星的距离上,以相应的距离误差来表示,称之为等效伪距误差。表3列出了GPS定位的误差类型及等效伪距误差。
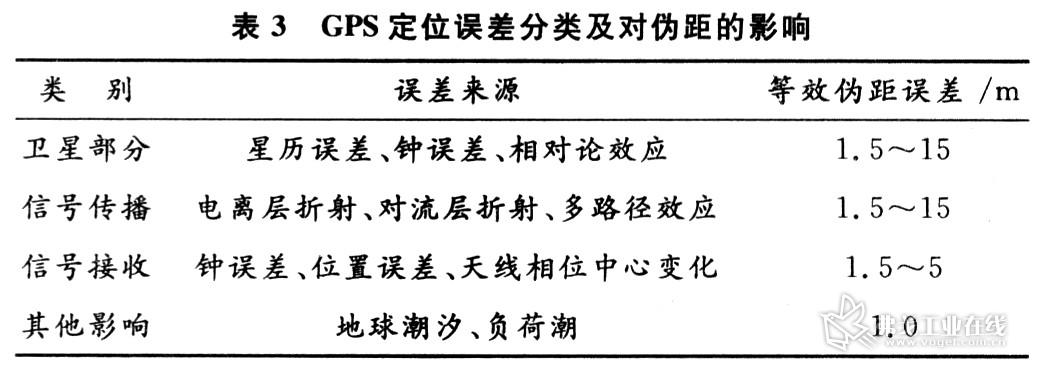
所述的各种定位误差源,在仿真过程中,为模拟车辆真实的行驶过程,需在计算中加入特定的误差。各种误差对定位精度的影响是不同的,仿真时不能精确加以区别,考虑到其综合的情况,以最大的定位误差来模拟。
2.5 定位求解
定位求解公式如下:
式中:R的确定参见参考文献[4];[Xs,Ys,Zs]为卫星瞬时地心坐标;[Xp,Yp,Zp]为车辆地心坐标。
定位车辆在wGS一84坐标系中的位置为一2 429.8 lim(X方向坐标),4 569.8 km(y方向坐标),3 760.7 km(Z方向坐标)。
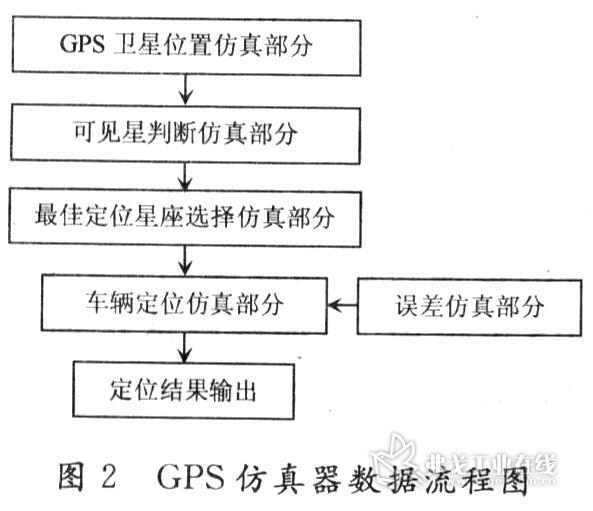
3 仿真试验系统的数据流程
GPS卫星星座仿真部分将所有卫星在wGS一84中的三维坐标实时输入到可见星判断部分,通过可见星判断得到观测点上空的可见卫星,并将其三维坐标数据输入到最佳定位星座选择仿真部分,该部分根据最佳定位星座选择方法得到由可见星中4颗组成的最佳定位星座,并将其坐标输入到车辆部分,车辆定位仿真部分根据最佳定位星座的三维坐标信息解算出车辆的三维坐标,最终实现车辆经纬度的确定,为车辆的定位及导航提供仿真实验数据。
#p#副标题#e#
4 仿真结果分析
该仿真器模型在Matlab环境下进行建模,得到车辆定位的相关信息如表4~表6所示。
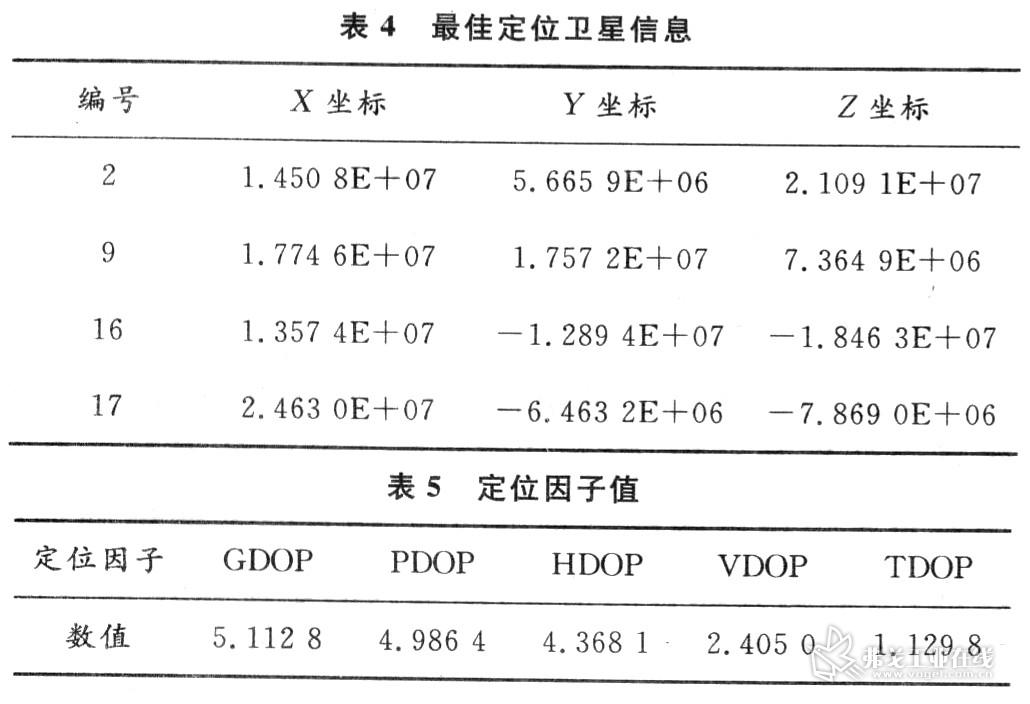
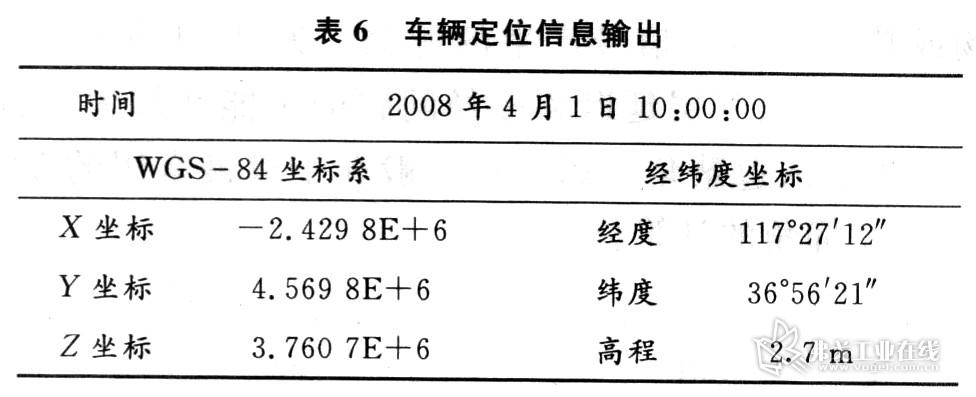
从仿真结果来看,在卫星历书基础上,通过对定位误差的引入和车辆位置的计算得到了定位系统的所有仿真数据。通常情况下,规定PDOP的值不能大于 6。由表5可知,几何精度因子数值合理,从而保证了定位数据的合理。该系统所输出的所有虚拟定位数据都能够满足车辆导航试验对数据的需求。
5 结 语
是一种先进的全球定位方法,正广泛应用于车辆定位与导航。该文根据卫星历书,分析GPs星座的运动轨迹,并在此基础上对接收机的位置进行解算,得到仿真的车辆GPS导航系统定位信息,实现定位导航的仿真试验。该车辆定位模型可以模拟真实的卫星定位,为仿真调试、虚拟驾驶等研究带来便利。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论