宝马的电子电气架构解析
文章来源:汽车ECU开发
发布时间:2021-04-23
宝马的电子电气架构解析,请见详文。
特斯拉和大众的电子电气架构可能被大家最为熟知,一个代表行业的标杆,另一个则代表传统OEM自我革新的标杆。除了这两者以外,似乎其它OEM都黯淡无光,其实不然,其它只是没有聚光灯照射,这其中就包括宝马。
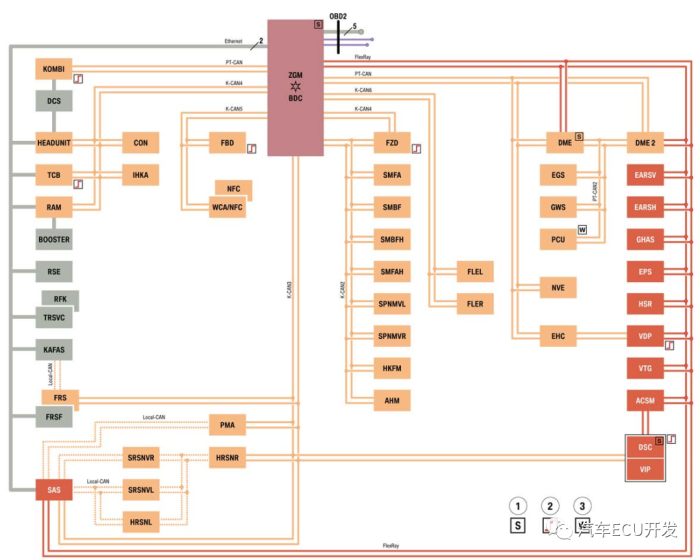
2018年宝马量产了其新一代电子电气架构,如图1所示,其大量使用了以太网通信,并且域控制器也得到了使用, 跟当年量产的Model 3的电子电气架构有的一比了。
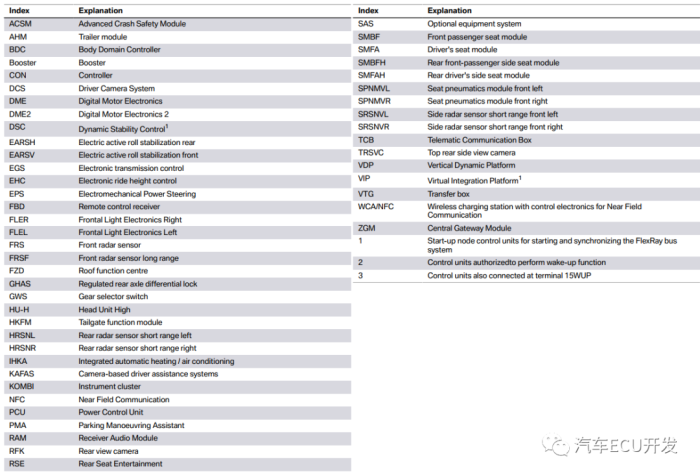
图1中各控制节点的含义如图2所示,例如ACSM表示高级碰撞安全模块,AHM表示拖车模块,DSC为动态稳定控制模块,BDC表示车身控制模块,EGS表示电子变速箱控制模块,HU-H表示娱乐控制模块,PCU表示动力控制模块,RAM表示音频接收模块,KAFAS表示基于摄像头的驾驶员辅助系统,IHKA为集成集成自动暖气/空调模块,SAS表示选装模块,即为ADAS模块,SMBF表示驾驶员座椅控制模块。
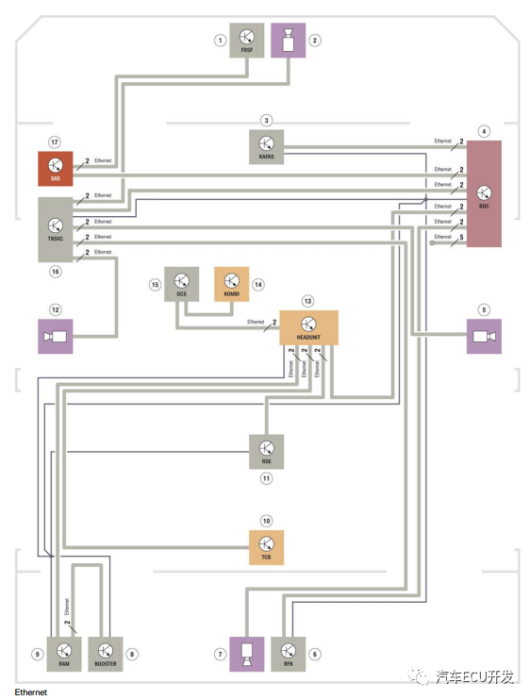
各节点之间的通信方式包括以太网、FlexRay、CAN总线,其中图1所示中灰色表示以太网总线,包括两线的OABR以太网和五线以太网,无线以太网主要用于BDC与OBD2之间的交互,单独的以太网通信节点如图3所示,深红色表示FlexRay总线,黄色表示CAN总线。CAN总线中又分K-CAN、PT-CAN、Local CAN,K-CAN表示通信CAN,K-CAN1用于BDC与音频接收模块RAM、FZD通信,K-CAN5用于BDC与NFC、远程接收器FBD,K-CAN6用于BDC与右灯光控制模块FLER、左灯光控制模块FLEL通信;PT-CAN为BDC与动力相关模块,包括DME、DHC等模块,Local-CAN为SAS,即ADAS控制器与传感器单元通信。
其中最值得一提的是SAS、BDC、HU-H分别为ADAS、车身、座舱域控制器,三者之中都集成了以太网交换机和网关,下面主要来介绍一下SAS和HU-H。
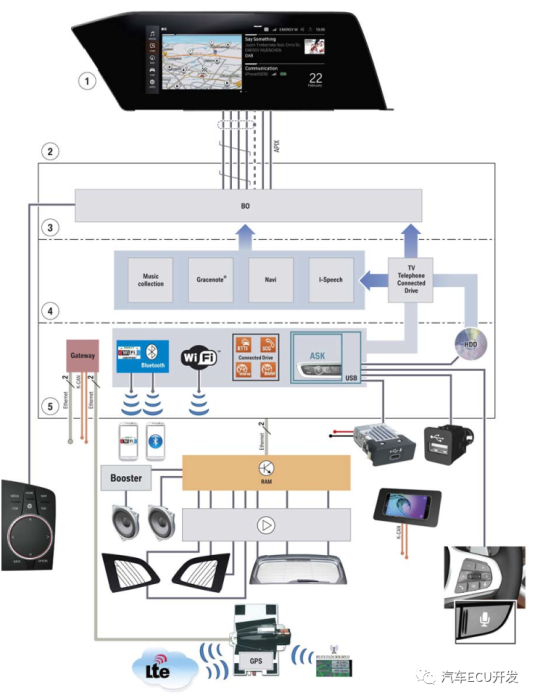
首先看门见山,看一下座舱系统的组件构成,如图4所示,从图中可以看到,这套座舱系统中居然还可以选装DVD,有点意思,难道外国外挺喜欢用着?
图4 HU-H座舱构成图,1为中央显示屏,2为HU_H控制器,3为用户接口,4为应用软件,5为设备连接接口。
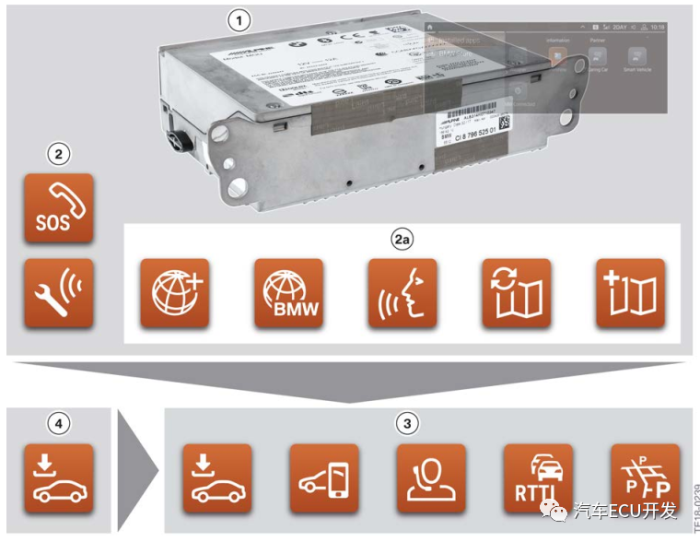
HU-H控制器的实物如图5左所示,右边为HU-H所具有的接口,其中1为蓝牙天线接口,2为WLAN天线接口,3为USB A接口,4为USB C接口,5为外接CD播放器的USB接口,6为用于连接中控显示屏CID(Central Information Display)的APIX接口,7为主接插件,8为以太网接口。另外为了导航、多媒体、软件等对内存的需求,HU-H中内置了320G机械硬盘,并且对不同的使用场景进行了分区,其中娱乐分了32GB,联网音乐分了16GB,Gracenote分了16GB,导航分了160GB,用户手册占9GB,其他杂项(系统,浏览器,音频输入等)分了15GB。
另外在网联方面,HU-H提供图6所示的功能,包括地图数据更新、车辆APP下载、自然语言识别、实时交通信息、Apple carplay、应用商店等。这些功能在2018年还是基于黑莓的QNX系统,在2019年后,全部采用Linux系统,这也是大部分OEM、Tier1和芯片厂商的选择,OEM包括丰田、奔驰、现代。本田等,Tier1包括博世、电装、安波福等。
图6 网联方面提供的服务,1为HU-H硬件,2为紧急电话服务,2a为自然语言识别、地图数据更新等,3为实时交通信息、Apple Carplay等,4为应用商店。
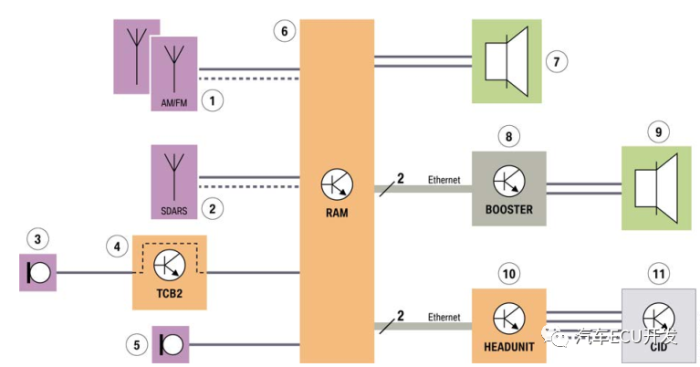
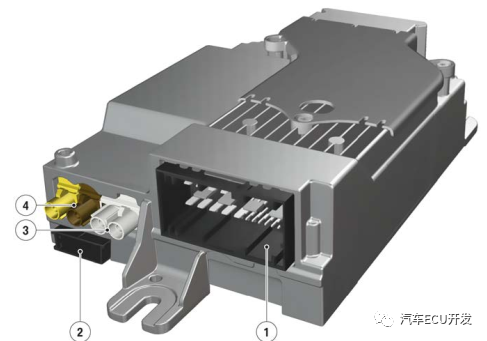
最后看一下音频系统,该系统主要由音频接收控制器RAM(如图8所示)负责,并通过以太网与BOOSTER和HU-H相连,如图7所示。
图7 1为AM/FM天线,2为SDARS天线,3为驾驶员
侧麦克风,4为T-BOX,5为乘客侧的麦克风,6为音频接收控制器,7为扬声器,8为Booster,9为扬声器,10为HU-H,11为中控显示屏CID。
图8 音频接收控制器RAM,1为主接插件,包括供电,K-CAN4等,2为以太网接口,3为AM/FM天线接口,4为SDARS天线接口
对于ADAS系统而言,对于车辆周围情况的可靠分析是高度和全自动驾驶的先决条件之一,因此获取车辆周围信息是必不可少的,要获取哪些信息呢?主要需要道路使用情况、静态环境、交通规则信息、可靠的地图信息、精确的车辆实时位置信息、驾驶员状态。这些信息是需要通过部署在车辆周围的各种传感器(超声波,雷达,摄像头等)采集并融合获得的,最后计算出一个模型。
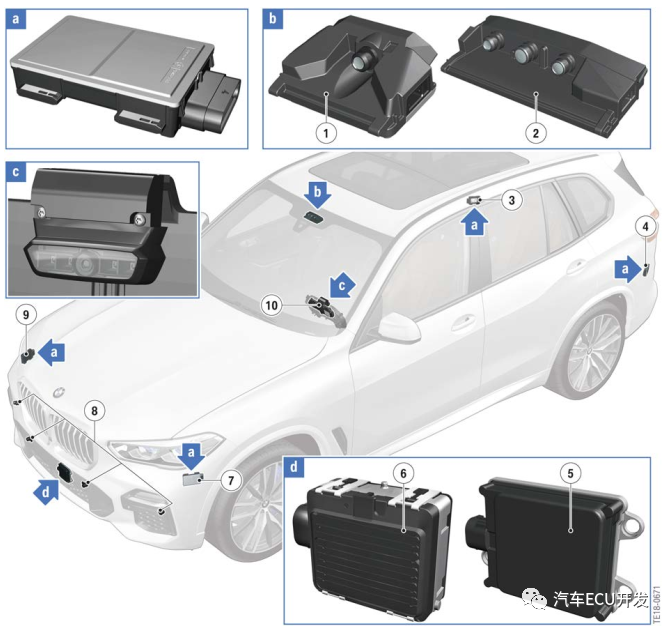
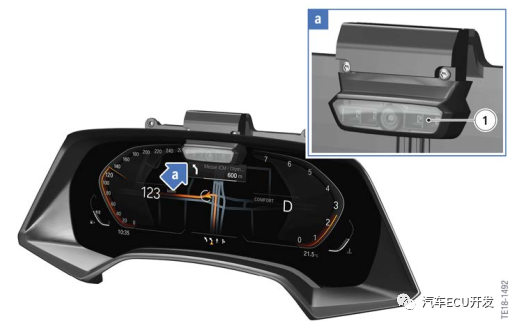
宝马的ADAS系统中使用的传感器如图9所示,其中驾驶员摄像头监控系统为首次加入,如图10所示。集成在DCS中的红外摄像机可以检测驾驶员的视线方向,并且据此评估驾驶员的疲劳程度,除了检测视线方向外,DCS还可以评估驾驶员的睁眼状态,并进行疲劳警告。另外为了减轻前部碰撞和交叉路口碰撞预警也使用了DCS控制器提供的数据,并且可以提前给驾驶员发出警告。
图9 ADAS系统的传感器配置,1为单目摄像头系统,2为三目摄像头系统,3为右侧短距雷达传感器,4为后方短距雷达传感器,5为前方长距雷达常感器,6为前方雷达传感器,7为侧方短距雷达传感器,8为超声波传感器,9为右侧短距雷达传感器,10为驾驶员摄像头监控系统
在2015年的宝马就开始使用基于单目和双目摄像头驾驶辅助系统,在2018年对其其进行了升级,其中一个是硬件方面,将双目摄像头升级为三目摄像头,一个用于近距离的鱼眼镜头,一个为中距镜头,一个是用于与雷达进行数据融合的镜头;第二是在性能方面,提高了探测距离和视野,最大可达250m,增加了计算能力、提高了夜间的性能。
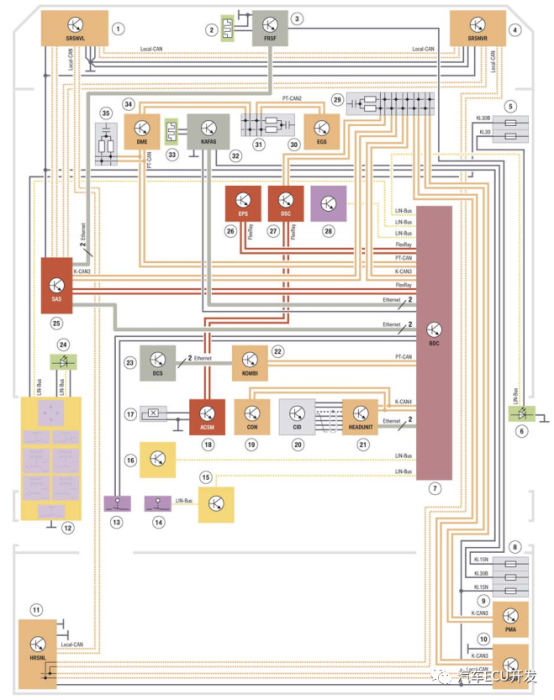
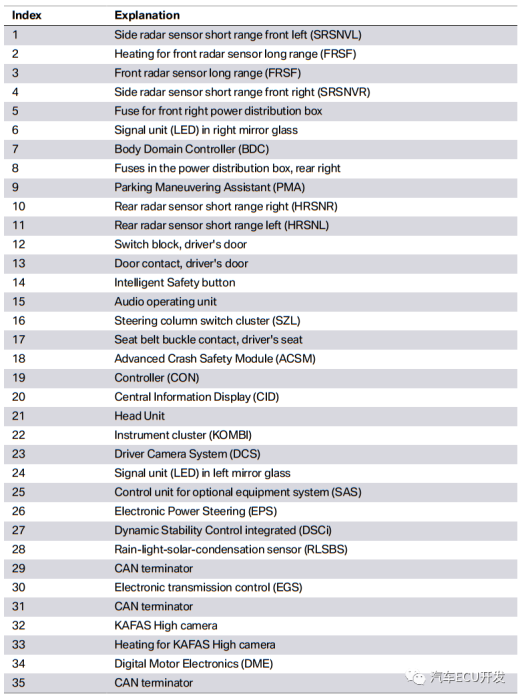
最后来看看ADAS系统的总体结构,如图11所示,图11中个节点的含义如图12所示,包括SRSNVK为左侧短距雷达,FRSF为前长距雷达传感器,SRSNVR为右侧短距雷达,PMA为泊车操纵助手等。
以上是宝马现在正在使用的电子电气架构,那其在未来的如何呢?
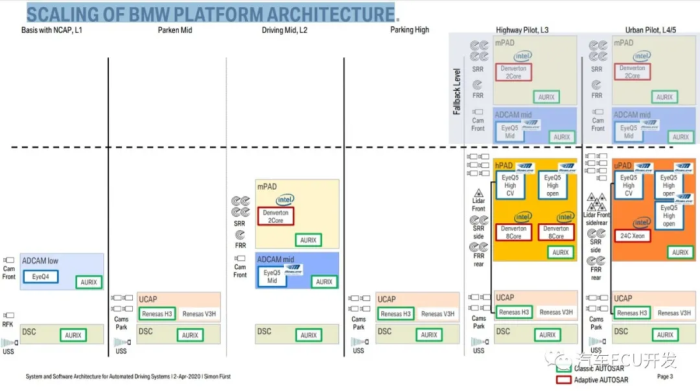
在ADAS方面,BMW的自动驾驶硬件架构采用的是增量式发展,比如L2的硬件架构可以作为L3/4/5级的备份,如图13所示。分别包含mPAD,hPAD,uPAD,
mPAD是第一代自动驾驶控制器,用于替换之前的分布式系统,搭配ADCAM Mid来使用,与L1 NCAP相比,ADCAM的处理器从EyeQ4升级为EyeQ5,mPAD的处理器为Intel的Denverton2core和Aurix TC39X,其功耗为25W,冷却方式为风冷。从之前展示的样品来看,其应该具有5路100Mbit的以太网,1路CAN,1路CANFD。
hPAD的外部传感器输入为6个摄像头,2个SRR,2个FRR,处理器为 2个EyeQ5,2个Denverton 8core和Aurix,从之前的展示(如图2所示)来看其具有6路100Mbit以太网,2路1Gbit以太网,1路Flexray,2路CAN,1路LIN,功耗为200W,冷却方式为水冷。另外mPAD和ADCAMMid作为hPAD的备份。
uPAD在hPAD的基础上增加了4个激光雷达和1个摄像头,处理器为3个EyeQ5,1个 Xeon24C,1个Aurix,从之前的展品信息来看(如图2所示)uPAD具有7路100Mbit以太网,5 路 1Gbit 以太网、1 路Flexray、2 路 CAN、1 路 LIN等,功耗为600W,冷却方式为水冷,如图3所示,另外mPAD和ADCAMMid也是作为uPAD的备份。
而在电子电器架构方面,宝马也在探讨在中央计算平台架构下的动态可配置系统(Dynamic Reconfigurable System,简称DRS),在满足功能安全的前提下,在Zonal控制器层面进行动态配置,使得其可以快速和之前的设计的ECU进行兼容。
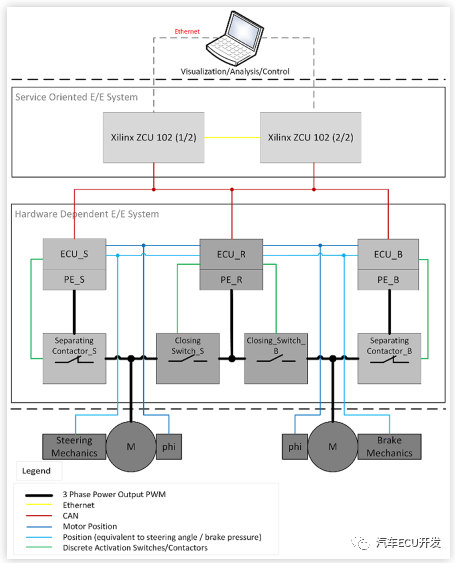
宝马的动态可配置系统如图14所示,其中分为三层,最底层为依赖硬件的电子电气架构,主要是执行器和传统的ECU,中间层为面向服务的系统,主要是是区域控制器ZCU组成,最上层为中央计算平台。其中最底层与中间层通过CAN总线进行通信,ZCU之间或者是ZCU与上层计算平台之间通过以太网进行通信。DRS的目的是实现基于处理器的Fail-Operational,目标是检测HDS和和ZCU本身的故障,然后采取相应的措施,保证功能正常运行。















获取更多评论