-
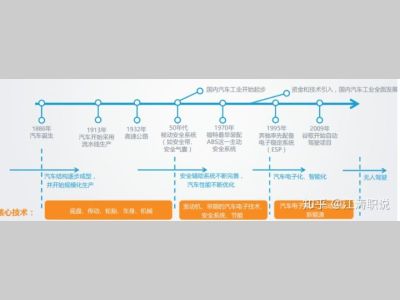
汽车行业发展之自动驾驶技术介绍及发展
自动驾驶则覆盖L1到L5整个阶段,在L1、L2阶段,汽车的自动驾驶系统只作为驾驶员的辅助,但能够持续地承担汽车横向或纵向某 一方面的自主控制,完成感知、认知、决策、控制、执行这一完整过程,其他如预警提示、短暂干预的驾驶技术(ADAS)不能完成 这一完整的流程,不在自动驾驶技术范围之内。 MORE
2019-11-21 知乎
-
-

自动驾驶:安全等三大方向明晰
尽管自动驾驶是大势所趋,但要真正落地其实还非常遥远,这也逐渐成为了共识,清华大学教授李克强和博世底盘控制系统中国区总裁陈黎明都曾提到,实现自动驾驶是一项相当漫长且艰巨的任务。 MORE
2019-11-18 智能座舱与自动驾驶
-
-
高精地图的机会与隐忧
高精度地图,不仅在极端天气情况下依然能发挥作用,且视野范围还不会受到遮挡、距离与视觉限制,可以与上述传感器在感知层形成很好的互补,为自动驾驶汽车提供更加可靠的感知能力。 MORE
2019-11-12 盖世汽车
-

自动驾驶与交通地理信息行业的发展思考
由于自动驾驶与测绘地理信息的密切联系,自动驾驶的发展对于地理信息产业的转型升级和结构调整,具有巨大的带动效应,值得广泛探讨相关法规标准、产业政策的发展方向,从而未雨绸缪,超前布局,及早占领产业发展制高点。 MORE
2019-11-05 数字高速公路
-
深度剖析:自动驾驶的安全考量
一个安全的系统需要可靠的设备,以防因设备故障发生事故;需要功能安全,以防因系统故障导致事故;还需要安全防护,以防因系统遭到黑客攻击发生事故。这些功能的有机结合有效防范了人为错误,从而提高了车辆的总体安全性。 MORE
2019-11-05 NXP客栈
-

L2.5自动驾驶辅助系统究竟是什么水平?
当车辆所配备的功能高于 L2 但还没有达到 L3,或者可以在某些特点路段实现完全由系统驾驶(仅限于少数特定路段,且驾驶员仍需实时监控)时,有些车企便将这类产品称为 L2.5 级,意即处于 L2 级和 L3 级之间的一个细分或过渡等级,然而,官方并没有明确定义,在标准上也比较含糊。 MORE
2019-10-22 腾讯汽车
-

自动驾驶中的夜间行驶策略
真正的自动驾驶功能需要在不同的环境条件下均可以进行一定程度的系统驾驶控制,在白天或光照充足的地方,该功能可以很好地实现环境目标探测,以此为决策控制提供贴合实际情况的输入信息。 MORE
2019-10-21 焉知汽车
-
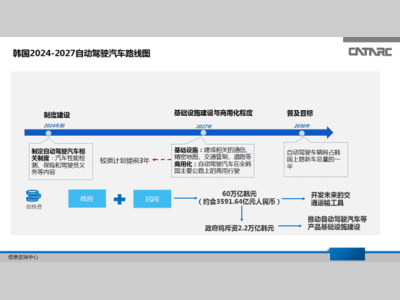
全球主要国家自动驾驶规划梳理
当前,全球自动驾驶发展主要处于测试与示范运营阶段,测试条件是衡量自动驾驶驾驶基础设施的重要标准之一,关系到技术测试及数据积累,而这些是高级别自动驾驶及商业化的必要条件。 MORE
2019-10-21 中国汽车工业信息网
-

-
-

自动驾驶视觉定位与导航技术的研究与应用
视觉定位与导航技术是智能体具备的基础能力之一,随着无人驾驶的发展,基于低成本摄像头及人工智能算法的视觉定位与导航技术成为了无人驾驶的主流技术路线之一。 MORE
2019-10-14 驭势未来
-
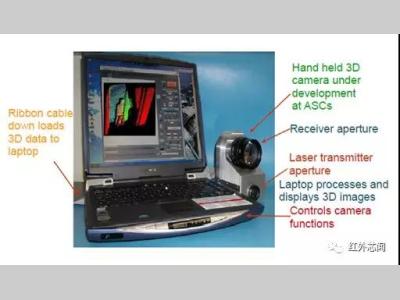
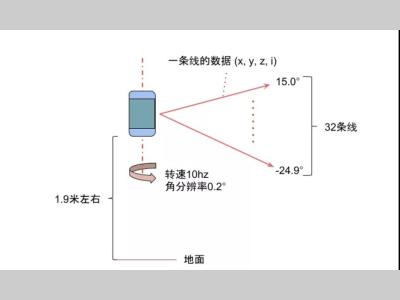
知荐 | 固态激光雷达研究进展
本文首先介绍了从机械式向全固态过渡的微机械系统激光雷达解决方案;其次针对激光雷达全固态的发展需求,介绍了面阵闪光、相控阵激光雷达的基本原理和典型实现方法,从液晶、光波导材料等研究方向阐述相控阵激光雷达研究现状;最后总结了目前激光雷达存在的问题及不同的解决方案,并对未来发展趋势进行了展望。 MORE
2019-10-12 《光电工程》2019年第7期
-

ADAS处理器芯片的全面梳理
在过去的两年多时间,我有拜访数百家企业,最近一直花时间在做针对性地梳理和总结。所以最近有意识的对大企业做一点研究,如之前的音频、视觉、IOT平台等,以及本篇的主要针对ADAS的芯片厂商,理解各家的主要产品线和状态。 MORE
2019-10-10 电子产业说
-
-

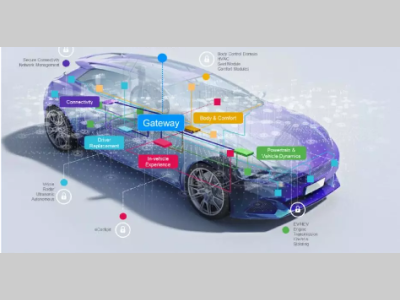
深度解读车联网和自动驾驶如何实现?
车联网是自动驾驶的前提,因为车联网将汽车组成互动网络(将车与网络连接在一起),通过搭设大量的传感器和先进的通讯技术,对周围车辆、公路、人、环境等信息进行感知和交换,从而实现自动驾驶和智能车辆管理的新一代车辆技术。 MORE
2019-09-26 知乎
-
“问诊”自动驾驶:安全等三大方向明晰
清华大学教授、汽车安全与节能国家重点实验室主任李克强认为,推动网联式自动驾驶产业化进程中,一定会出现“中国方案的自动驾驶”。围绕这个方案还会形成五大基础平台:云控基础平台、高精度动态地图技术平台、车载终端基础平台、计算基础平台和信息安全基础平台。 MORE
2019-09-23 汽车之家
-
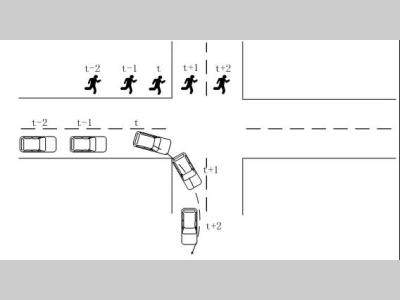
自动驾驶汽车决策控制系统技术解读
自动驾驶系统是一个集环境感知、决策控制和动作执行等功能于一体的综合系统,是充分考虑车辆与交通环境协调规划的系统,也是未来智能交通系统的重要组成部分。本文着重分析自动驾驶决策控制的相关技术,探索未来的发展方向。 MORE
2019-09-17 公安部交通管理科研所
-

热点文章
-

-
【北京车展】联合电子携多样化解决方案和创新技术亮相2024北京车展,驾驭未来出行
2024-04-28
-

舍弗勒强化与西门子在人工智能领域的合作
2024-04-28
-

航盛电子与奥托立夫签署战略合作,加速布局自动驾驶领域
2024-04-29
-
【北京车展 】华阳新一代域控解决方案发布
2024-04-30
-

与北京车展同辉,哈曼Ready系列加速汽车智能化赛道升维
2024-04-30
-
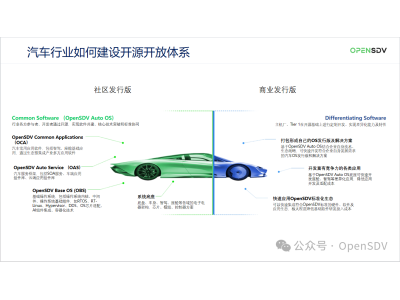
OpenSDV操作系统工作组召开智驾操作系统社区发行版项目启动会
2024-04-28





