在有限的空间应用AGV
图1 AGV工作过程描述
以差速方式跟踪,不需要转换机构即可实现双向运行的AGV系统节省了运行空间,提高了运送效率,实现了AGV小车与工位之间的零对接,扩展了AGV的环境适应能力。
自动导引车(AGV)早期被称作“移动式机器人”,起源于20世纪60年代末期,主要应用于发达国家的科研项目中,少部分投入工业生产及程序化工序搬运。AGV作为移动机器人的代表作,出色地实现了人工智能在各领域内代替人工的功能。由于技术的先进性和昂贵的造价,最初只有小部分发达国家中的大型企业采用,我国于90年代末期引进AGV技术,并逐步应用于工业生产中。
AGV属于轮式移动,与步行、爬行或其他非轮式的移动机器人相比,具有行动快捷、工作效率高、结构简单、可控性强及安全性好等优势。与物料输送中常用的链式设备相比,AGV的活动区域无需铺设轨道、支座架等固定装置,不受场地、道路和空间的限制。因此,在自动化物流系统中,最能充分地体现其自动性和柔性, 实现高效、经济及灵活的无人化生产。
AGV系统的新亮点
在汽车行业竞争日益激烈,国内劳动力成本逐年上升,而汽车价格逐年下降的大环境中,所有汽车企业在车型研发、提高性能和用户个性化需求的前提下,均面临一个如何实现“高产量,低成本”的问题。老式生产线大多都采用链式输送设备,比如:悬挂输送机、地面链和滑撬等,存在着技术落后、效率低、灵活性差、噪声大及耗电高等缺点,加之汽车型号和规格的增多,产量的增加,迫使汽车生产企业必须改造过去的老式生产线,以适应新的生产需求。所以,很多工厂在改造过程中,选用了现代化的物流运送方式——AGV。
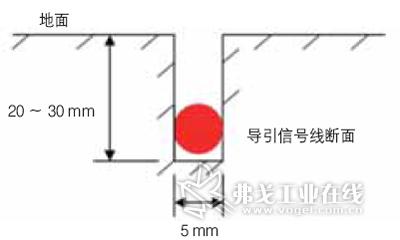
图2 电磁导航方式可以将导航线埋设于地下或滑槽植入地表
但是目前国内的AGV小车均采用舵轮跟踪,依靠拖动的方式引导主车车体。由于舵轮的特性难以实现双向引导,所以均为单向运行,遇到直线往复的运行路线时将很难达到现场要求,必须采用循环路线,通过闭环运行实现重复装载任务,不仅浪费空间,降低工作效率,一旦遇到空间狭小的工作环境,AGV便无法正常工作。
鉴于以上的状况,在今年的车间改造中我们首次采用了差速跟踪能够实现平移的AGV小车。
典型应用案例
在老厂房的环境下使用AGV存在一些问题,尤其是空间的排布,受到原有建筑格局及设备的影响,AGV运行线路受到限制,特别是在运送大型部件的时候,比如:侧围板、底板总成等,会造成车体转弯半径过大,在有限的空间范围内无法实现AGV与工位的直接对接,中途需要加入人工来搬运,致使AGV的优越性大打折扣。
针对以上问题,我们在某汽车侧围板拼装线的AGV方案中,设计了可以横向90o行走的AGV,减小了运行空间,提高了运行速度和工作效率,整个工作流程不需要人工干预,实现了AGV与工位之间的零对接。
AGV通过PLC控制,小车载有无线通信系统,可以和上位机进行无线通信,报告自己的运行位置和工作状态,执行上位机的指令,把工作节拍和工作量及时传递给上位机;AGV通过RFID读取地面标识,做出相应的动作(改变速度、转向、定位和停车等);AGV车身底部装有RFID读头,地面的节点位置安装有RFID地址卡;每个卡的地址可以任意编写,读头可以在10ms时间内读取地址卡的数据,PLC根据读取的数据,使小车作出相应的动作。PLC既可以根据预先设置好的程序来控制小车,也可以把数据上传给上位机,再根据上位机的指令来控制小车。
1. AGV工作过程描述
图1中紫色路线为AGV的运行路线,AGV需要在A点与B点之间往复运行。侧围板装载在专用的物料小车上,AGV负责将物料小车从A点运送到B点,AGV与载物小车脱离后,再将空的物料小车从B点运回A点。其间,当AGV运行至A/B点的拐角时,由于空间有限,只有一条很窄的通道,AGV无法转弯。为了能够使AGV与工位零对接,AGV具备90o平移功能,当行至直角拐角处时,AGV执行平移动作,横向跟踪运行至工位;卸下物料小车后,AGV横向返回至直角拐角处,进行第二次平移,平移后竖向跟踪路线运行至B点。如此反复运行,平移过程均为自动方式,不需任何人工干预,在有限的空间范围内,实现两点或多点之间的运送任务,节省人力物力的同时,大大提高了生产效率。
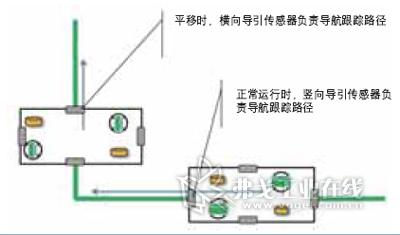
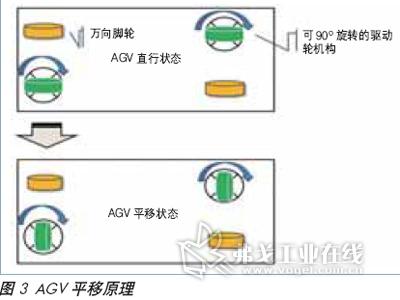
图4 AGV平移过程
2. AGV导航方式
由于车间现场空间有限,在AGV的运行路线内,经常有工人、叉车和拖车等横向穿越导航线。为了防止叉车、行人或其他设备通过导航线时,损伤导航线造成设备故障,我们选用了电磁导航。如图2所示,电磁导航方式可以将导航线埋设于地下或滑槽植入地表,即使有行人或设备通过运行区域也不会出现导线划伤或断裂的状况。
3. AGV平移原理及过程
AGV采用4轮结构,对角安装两个驱动轮,驱动轮采用伺服控制,差速跟踪;另一个对角安装两个万向轮,驱动轮既可以驱动也可以水平旋转180o,驱动轮的水平旋转机构由安装在舵机上的两个伺服电机控制,可同步旋转;车体安装4个导引传感器,分别为:横向前进导引传感器、横向后退导引传感器、竖向前进导引传感器及竖向后退导引传感器。这样,小车既可以前进后退双向行走,也可以左右双向行走,4个方向都可以跟踪。AGV平移原理如图3所示,平移过程如图4所示。
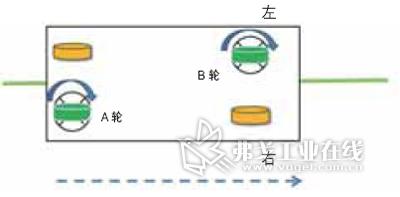
图5 差速跟踪原理
4. 差速跟踪原理与优点
差速跟踪原理与优点如图5所示。图中,A轮和B轮为分别单独控制的两个差速驱动轮,当AGV导引传感器跟踪路径时,会根据路径信息判断出小车的偏离状态,控制系统将传感器发来的偏离信号判断处理后向A轮和B轮发出速度控制信号。假设A轮的速度为va,B轮的速度为vb,那么当va>vb时,AGV向左转弯;当va<vb时,AGV向右转弯;当va=vb时,AGV直线运行。同理,当两个差速驱动轮同时旋转90o以后,AGV便可平移跟踪运行。
AGV的发展趋势
由于国内市场中AGV的载重能力一般在100~2000kg之间,处于小吨位物品的转运与承载阶段,随着市场需求的扩大,AGV将趋向于大吨位、多路径、高柔性和集成模块化的方向发展。在集成程度提高的同时,对空间范围内的适应能力也将是一个行业能否引用AGV系统的主要因素。由于我们前面所陈述的案例,以差速方式跟踪,不需要转换机构即可实现双向运行,整车的平移机构大大节省了AGV的运行空间,提高了运送效率,扩展了AGV的环境适应能力。因此,在未来AGV的应用中,带有平移功能的AGV将成为市场的主导力量。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论