喷涂机器人生产过程中的防碰撞应用
当今社会科技水平突飞猛进,电气自动化程度越来越高。自动化生产线已成为当今社会的主流,机器人喷涂方式也成为了汽车涂装行业倍受青睐的喷涂技术。但随着机器人喷涂技术应用越来越广泛,随之而来的是各种各样的问题,其中一个就是机器人系统碰撞,一旦碰撞发生将会对机器人系统造成破坏性的损失,所以如何防止机器人系统发生碰撞,是机器人系统安全性的一个重要体现。
机器人系统碰撞问题按碰撞种类可以分为机器人与机器人间的碰撞、机器人与喷房壁板间的碰撞,以及机器人与工件(车身)之间的碰撞,按产生的原因分类可以分为车型错误引起的碰撞、人员误操作引起的碰撞及滑橇滑移产生的碰撞等。
使用机器人干涉区防碰撞
1.机器人干涉区定义
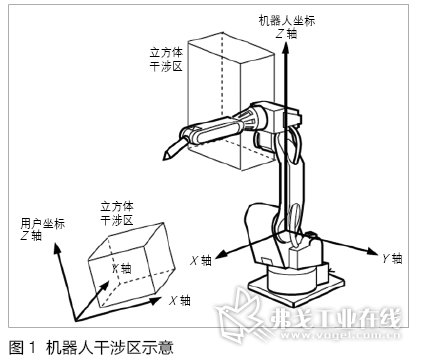
所谓干涉区(图1)是指几个机器人之间、机器人与周边设备之间的功能。每台机器人干涉区最多可以设定64个,其使用方法有两种选择:①立方体干涉区:是基座坐标、机器人坐标和用户坐标中任一坐标轴平行的立方体;②轴干涉区:是指判断各轴当前位置并输出信号的功能。
2.机器人干涉区设定方法
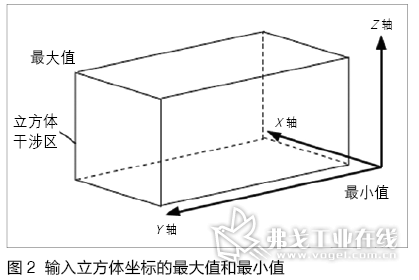
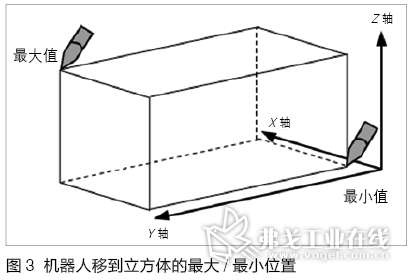
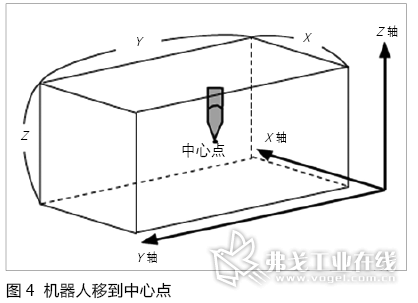
立方体干涉区的设定方法有3种:①输入立方体坐标的最大值和最小值(图2);②用轴操作键把机器人移到立方体的最大/最小位置(图3);③输入立方体的三边边长(轴长)数值后,用轴操作键把机器人移到中心点(图4)。
轴干涉区设定方法与立方体干涉区设定方法相同,其区别只在于轴干涉设定的为每个轴旋转的角度,可参照立方体干涉区操作方法设定。
本项目中采用日本安川机器人,但其他品牌机器人亦具有此功能。
3.机器人干涉区使用示例
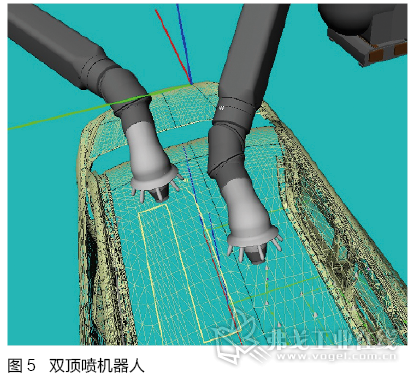
机器人与机器人间的碰撞最有可能在双顶喷机器人间产生(图5),因为二者的工作区域虽无交叉,但由于旋杯机器人本体的几何形状(尤其是外部加电的放电针),当一台机器人进入中间喷涂区域时,对侧机器人如果进入相同区域就有可能产生碰撞,这类碰撞的防止是以节拍时间最长的机器人为基准,当该机器人进入定义的干涉区区域时,其他机器人不得进入,直到该机器人离开干涉区区域为止。
车型校验确认防碰撞功能
1.车型校验确认功能定义
所谓车型校验确认是指在车身进入自动喷涂线体前,对输送过来的车身进行车型的校验,由于涂装车间的线体全部为不同车型共线生产,所以此功能为喷涂机器人系统必不可少的功能。
2.车型校验分类及优劣对比
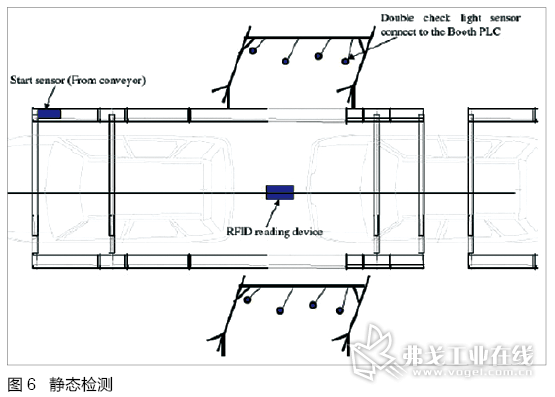
(1)静态检测
如图6所示,检测光电开关安装在手动擦净入口读写站安装的滚床两侧,利用滚床到位信号进行检测,光电开关的位置依据不同车身的特征点差别进行确认。
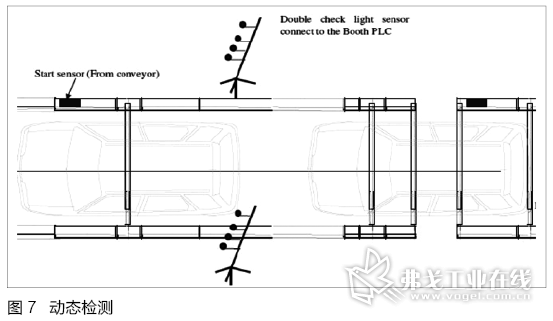
(2)动态检测
如图7所示,动态检测二次确认开关安装在输送链入口处,并且需要保证滑橇已经安全脱离入口滚床(避免滑橇和输送链有相对滑动,这是由滚床和输送链不同步造成的),光电开关的安装高度取决于车身在滑橇上的高度,工作原理是当车身匀速经过四个光电开关时,系统PLC跟踪车身位置,每运行50 mm(可调)记录一组四个光电开关的状态(1或0),当车身完全通过时,比较记录的数据与该车型示教的标准数据,如果90%(可调)吻合,则判别车型正确,否则报警停线,等待人员干预。
3.滑橇位置检测
(1)检测原理
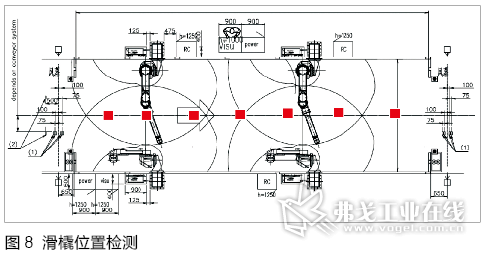
如图8所示,红色方块表示新增加的接近开关,用以检测滑橇。下列的接近开关以1 000~1 500 mm的距离均匀分布在喷房内,滑橇每经过一个接近开关,系统就得到一个脉冲,根据链速的不同,可设定在一定的时间容差内,如得不到下一个接近开关的脉冲,则认定有滑移,并可设定作报警或故障处理(图8的接近开关数量、机器人数量和喷房尺寸仅作参考)。
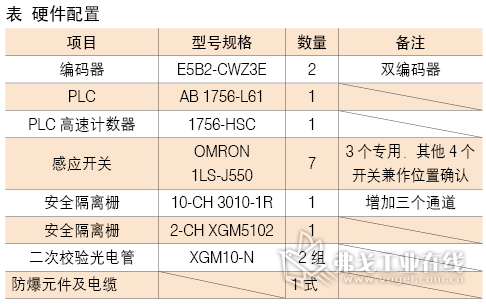
(2)滑橇滑移检测功能所需的硬件配置
表中所示为滑橇滑移检测功能所需的硬件配置,表中配置以中涂线为例,面漆配置与此类似。
产生碰撞时的高压报警
SAMES旋杯的电流控制有碰撞检测功能,当机器人TCP与车身距离过近时,GNM200的输出电流迅速升高,将产生SOFT DI/DT或者COLLISION DETECT报警,并将该信号传递给PLC,PLC根据该信号可以停止机器人及输送链的运行,该功能够在一定程度上防止碰撞的产生。
本项目中采用SAMES旋杯及GNM200高压控制器,具有电流检测功能,其他品牌亦具有此功能,但报警信息可能不同。
结语
采用机器人喷涂技术相对传统的手工喷涂具有很大的优势:机器人能做到人体难以适应的高强度、快节拍连续作业;能够适应对人体有害的喷涂操作等。随着机器人喷涂技术的广泛应用,机器人系统的安全性也成为一个不可忽视的课题,安全性能提高的过程也意味着维护成本的降低。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖