下一代智能汽车还探索哪些创新性功能设计
文章来源:焉知
发布时间:2021-07-19
从下一代自动驾驶系统来看,多数主机厂将以实现面向服务SOA的功能设计单元为主要目标,这就必然倾向于解决当前这代产品的必然不足之处,增加如下主要功能子项。
智能驾驶系统作为一个集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术的典型高新技术综合体,在当前已经开展的如火如荼,然而从业界来看仍然是以原始的智能驾驶功能为主,其中包含0-3级智能驾驶功能配置。
0级产品的报警功能,如FCW、LDW、LCDA等;1级智能驾驶功能的单纵向或单横向控制功能,如ACC、LKA等;2级智能驾驶功能的横纵向联合控制功能,但必须保证整个驾驶过程中驾驶员处于在环状态(即当系统无法持续控制车辆时,驾驶员能够及时的接管车辆),如集成式巡航或驾驶员控制的拨杆变道。3级智能驾驶功能的持续横纵向控制,甚至在其所定义的设计运行范围ODD内,驾驶员可以完全不在环,功能诸如TJP、HWP等。
如上这一系列功能都是比较传统且大家熟知的功能,且基本均已量产。从传感、控制、决策的角度上说,在不同的等级Level中往往采用了同一套传感控制架构,从性能上的不同可能仅仅存在于其算法模型和硬件本身的感知能力了。而从下一代自动驾驶系统来看,多数主机厂将以实现面向服务SOA的功能设计单元为主要目标,这就必然倾向于解决当前这代产品的必然不足之处,增加如下主要功能子项。
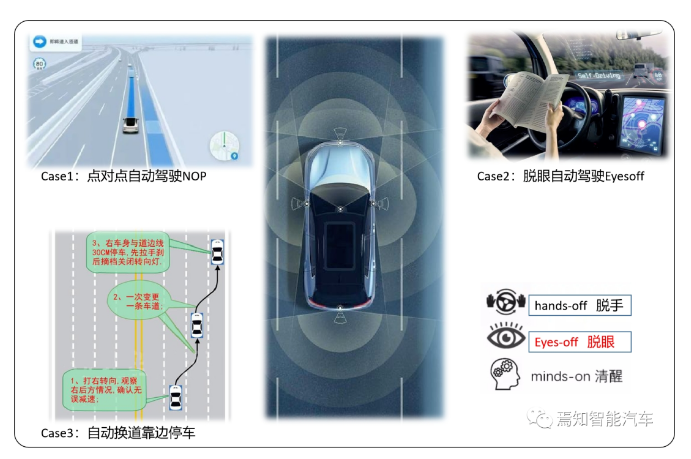
①点对点自动驾驶(NOP,Navigation Of Pilot):
基于驾驶员设定的导航目的地,控制车辆在适当的时机开启自动换道功能ALC,自动换道进入匝道。随后,通过摄像头或高精定位地图发出的匝道内实际半径或限速值,通过自动限速模型控制车辆进行自动减速进出匝道。最后通过接收高精定位地图发出的前方收费站信息,控制车辆自动减速进入收费站。这里可以实现高速、快速路或结构化道路的自动驾驶功能。
②增加限定路段的脱眼驾驶(Eyes off Drive):
当前很多厂家已经面向量产的自动驾驶功能均无法确保驾驶员脱眼驾驶,驾驶员在整个驾驶过程中仍旧需要将视线关注于前方驾驶环境。下一代自动驾驶系统产品将释放更多的驾驶自由性给驾驶员,在特定工况下,驾驶员不再关注自动驾驶所控制的车辆行驶过程,释放双手双脚的同时更能解放双眼。
系统在突发故障或其它紧急情况时下仍旧需要自动保持车辆在车道内的横纵向控制,同时提醒驾驶员接管车辆并停止加速,如果驾驶员未接管车辆则自动控制车辆在本车道内减速停车或通过探测旁边车道的可通行程度有条件的换道至紧急车道停车,并自动打开双闪提示其他交通车辆。
然而,对于智能驾驶来说,下一代自动驾驶系统架构及方案选型是花大成本进行构建的,所采用的这套架构模型实际可以承载更多的创新性功能。并且这些功能都是基于用户痛点所带来的亮点功能,在不增加任何硬件成本的前提下,我们完全可以采用的功能方案。本文将以典型的几个智能驾驶创新例子进行功能说明,希望为读者打开思路提供更多的帮助。
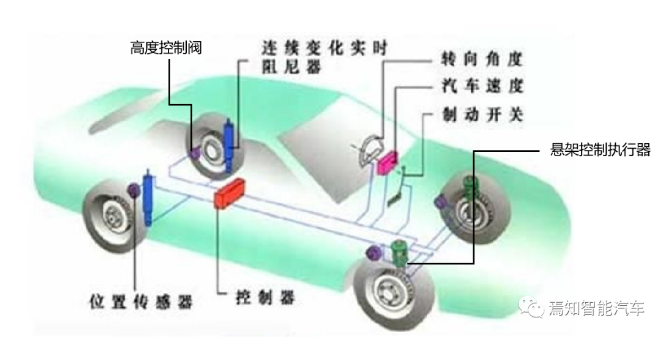
智能汽车产品基本都配置了主动悬架系统,这套系统的刚度和阻尼特性能能根据汽车的行驶条件进行动态自适应调节,使悬架系统始终处于最佳减振状态。同时,当承载质量发生变化或道路条件发生变化时,主动悬架可以调整自身参数,使车身的离地高度保持在合理的数值上,从而提高汽车的操纵稳定性、平顺性和通过性;主动悬架可以调节悬架的参数,从而降低车轮载荷波动,提高附着性能,改善操纵性,同时减轻了轮胎的磨损。
如上这种控制方式具有诸多优点,比如可以控制车身高度,提高通过性,兼顾汽车的平顺性与操纵稳定性等。咋看起来,智能驾驶与悬架似乎扯不上边,除开在执行控制端上容易出现由于悬架所产生的控制偏差。其实,只要结合用户在驾驶过程中的痛点场景,我们不难发现,特定工况下的智能悬架功能可以为我们带来很多的最佳体验感。
那么在设计新功能层面我们将如何应用车辆悬架层级的功能来为智能驾驶提供更多的服务呢?上面提到汽车的行驶条件是产生主动悬架功能的前提,同时需要基于场景来分析哪些行驶条件会激活主动悬架。
当汽车制动或拐弯时的惯性引起弹簧变形时,主动悬架会产生一个与惯力相对抗的力,减少车身位置的变化。比如当车辆即将拐弯时摄像头传感器探测到前方弯道半径信息,系统根据自身模型构建,提前预测出车身过弯可能的倾斜程度和横向加速度,中央控制单元根据传感器的信息,与预先设定的阈值进行比较计算,提前确定在什么位置上将多大的负载加到悬架上,可使车身的倾斜减到最小,以保证车辆行驶的稳定性。
当自动驾驶传感器(如摄像头、激光雷达等)探测到前方出现坑洼状态时,特别是激光雷达或双目摄像头能够主动探测到目标物的高低,发送给中央控制单元后,智能的控制悬架系统提前提升车辆到合适的位置,以避免底盘过低与该凸起路面相撞。
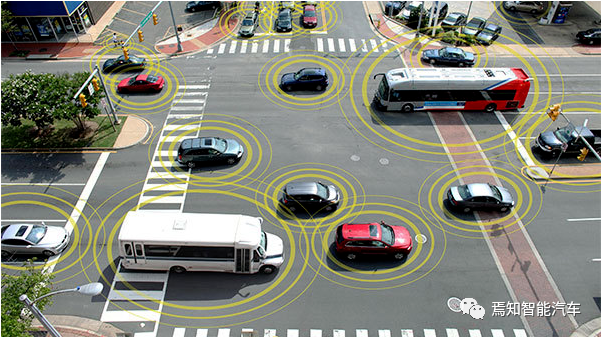
下一代智能驾驶系统对其后方探测能力提出了更高的要求,比如后向检测会更多的考虑加入后视摄像头、后中距离雷达等,这类传感器的加入会很大程度上提升车辆的后向探测能力。从而确保后向探测过程更加符合对实际环境的探测能力要求,能够探测到后方目标的距离、速度、加速度的同时,更能够探测到后方目标的类型(如车辆类型包含救护车、消防车、警车等),探测自车前方相邻车道的变道可能性,主动发起并执行变道控制请求,对后车进行让行。
实现该功能简单来说只需要后视摄像头探测到后方特殊车辆目标,但是不是特殊车辆就需要实现换道让行,只有在真正紧急状态下的特殊车辆才需要进行比避让,而这种特殊车辆执行状态的识别,更多的需要依赖于车辆联网状态(如利用V2V功能)的识别而非仅仅依靠传感器识别,从而能够更加明确地肯定后方车辆的实际执勤状态。
因此,对于该功能而言对于车辆的实际状态检测准确率要求较高。需要充分考虑到本车是否具备相应的换道执行条件是否满足。且换道避让过程中最好能够给予驾驶员充分的提示,以避免突然出现的换道带给驾驶员的突兀感。
下一代自动驾驶系统在传统驾驶辅助系统配置基础上增加了侧方摄像头,与全景摄像头不同,侧视摄像头除开能够辅助角毫米波雷达进行侧方目标探测能力外,还可以探测到更多更远的物体目标,且能够进行语义级分辨(如侧边有货车、轿车、摩托车、侧边道线等),同时可以探测到更加精准的侧向目标距离、类型、距离、速度、加速度等。判定出侧方目标运动趋势,当侧方目标并行移动向本车时,自车可做一定程度的智能偏移避让,同时自动启动类似喇叭功能提示环境车辆偏离车道行驶。同时,车内告警系统通过提示驾驶员注意侧方碰撞危险报警信号,提示驾驶员在自动驾驶状态下主动接管车辆控制。
该功能通常用于高速长途长时间驾驶过程中,突发大货车疲劳驾驶偏离车道至本车道的情况。
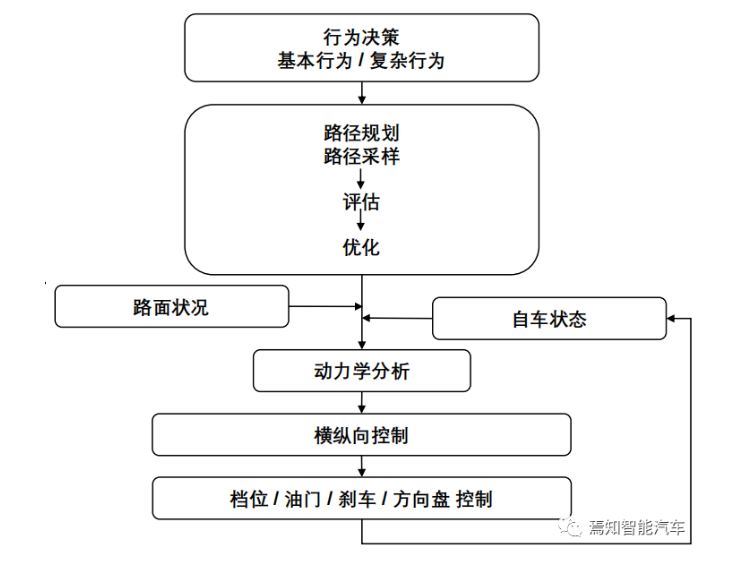
在特定驾驶工况下, 驾驶员可以有多种方式选择与前方车辆或障碍物避撞,最简单的就是刹车制动和转向避撞。通常情况下,常用的方式都是如AEB功能一样做前向减速避撞。原理是以计算TTC为比较阈值,然而除开减速避撞外,也可通过紧急转向方式避撞。即,当在系统检测避撞所需要的时间TTC大于阈值时(认为系统以最大能力减速仍无法避免碰撞),则可以同时计算转向避撞时间TTS,若此时TTS小于阈值,则系统通过转向反应能力和转向力度可进行紧急避撞。
主动转向避让过程包含本车道转向偏移避障及旁车道换道避障。两者触发的前提条件是不一样的,本车道转向避让是针对前方小目标物体(并未占用本车道过多位置)进行转向避让,旁车道换道避障判定前提条件是本车道转向无法实现真正的避障时,需要通过角雷达或侧视摄像头搜寻旁车道可用空间控制车辆向旁边车道主动换道避撞。
车身环境监控预警包含几个层面的监控。有路面环境监控、乘员状态监控预警、陌生人接近监控警告(或哨兵模式)等。
路面环境监控主要是配合整车控制所能实现的驾驶控制功能而言的。即通过传感器实时监测行驶路面,当路面环境出现障碍物、坑洼、凸起、打滑结冰时,预判自车是否能够通过该异常路面行驶,从而提前启动智能悬架、安全制动、安全转向等方式。此过程中系统需要判定自身处理能力评估是否对驾驶员进行紧急报警。
乘员状态监控是通过车内乘员监控摄像头或毫米波雷达监控车后排乘员是否存在,当驾驶员开驾驶侧车门离开车辆时,系统监控到后排乘客区域有人或遗落物品时,会通过发出声音警告提示驾驶员。
陌生人接近监控警告是检测到有陌生人接近本车时,本车通过外挂摄像头或检测到该靠近的人员是否佩戴本车钥匙,判定该人员是否为本车驾驶员,从而确定采用相应的方式控制车辆视频记录系统及警告系统进行及时的视频记录及告警。
这里要着重讲一下该功能对于自动驾驶系统控制单元的产生的相关需求,主要体现在对于下一代自动驾驶域控制器的功耗及存储能力消耗上。因为环境实时监控要求自动驾驶域控制单元具备更大外设的存储空间,如eMMC或LDDR,一般采用至少大于64GB的多个eMMC作为存储终端,且每隔7-10天会通过刷写更新不断迭代替换原来的存储单元。但是这里需要注意的是eMMC这样的刷写单元,是将存储单元划分为不同的Block进行数据写入,当重新写入新数据时也就意味着原存储模块block中的数据将被覆盖住,这就意味着划分足够多且寿命长的block是确保车身环境监控功能正常运行的前提。
此外,持续性的监控过程也需要系统具备较强的电能储备能力,因此,对于记录控制单元的功耗要求也是比较高的。因此在芯片选型过程中需要充分考虑对每个核进行功能分配,确保其工作的功耗分配合理性。
从实现可行性上分析,下一代自动驾驶将可以很好的实现本地传感器对环境目标的探测能力的极大提升,主要体现在城市场景下可以很好的识别红绿灯,且识别结果可以很好地用于提前对车辆的控制。当然,这种场景已经是城市工况下的自动驾驶了,甚至可以称之为L4级别的自动驾驶功能。从L3向L4做功能过度的角度上讲,在当前所能识别的红绿灯前提下,只需要结合实际情况做一些简单的控制即可。
1)提前一定距离识别到红灯或黄灯,控制车辆提前减速至停车线前方停车;
2)定速巡航状态下,提前一定距离识别到红绿灯倒计时,通过计时时间,预判本车参照当前巡航速度下能否顺利通过红绿灯,如果时间足够长,则控制本车参照当前车速持续行驶通过红绿灯;如果时间不足,则控制本车持续减速停车;如果本车处于跟车行驶状态通过红绿灯时,如果前车加速行驶通过红绿灯,本车需要同时预判红绿灯倒计时时间和自车跟随前车巡航加速通过停止线需要的时间,如果后者时间更短,则控制自车跟随前车加速通过,否则仍旧参照无跟车行驶状态控制自车减速停车。
对于下一代自动驾驶系统而言,由于新增了很多传感器探测单元,并且其控制器也是呈现了质的飞跃,从成本角度上说,是完全可以考虑开发更多新功能,适配于驾驶员更多的需求。作为智能驾驶的function owner,在设计下一代自动驾驶产品时,需要更多的关注当前已经量产或上市的产品对用户造成的困扰,以客户为导向开发的功能进行发散,且这些小功能的开发可以类似手机模式一样在量产后进行推送或软件OTA。
















获取更多评论