基于虚拟迭代的货车驾驶室疲劳载荷分解
目前商用车驾驶室静态强度、刚度分析方法已经成熟,但是还不能完全指导设计。由于受力复杂,试验无法提供部件在系统或总成中的受力状态,利用仿真手段解决车身疲劳耐久问题不具备,驾驶室车身在开发过程中的疲劳寿命只能靠试验验证,延长开发周期,增加开发成本。
在商用车研发阶段,驾驶室部分是几大总成之一。在开发阶段对驾驶室进行疲劳仿真分析,如果能在设计阶段对驾驶室进行疲劳预测,并找出对驾驶室寿命影响较大的敏感部位,然后对其进行改进设计,得到一个较理想的设计方案。这个流程的形成将会提高并推动驾驶室开发的疲劳性能可靠性设计。
本文结合某中型货车驾驶室疲劳性能开发纵向项目,提出了一种以车身加速度为目标信号进行虚拟迭代分解驾驶室疲劳载荷的方法。载荷分解技术路线如图1 所示。

路谱采集及数据处理
进行虚拟迭代,首先要获取迭代目标信号,使用合适的传感器和采集系统,获取不同类型的耐久道路载荷谱。路谱作为迭代目标信号,其精度和可靠性对迭代结果有很大影响。道路谱信号中存在漂移、毛刺等干扰,所以要进行数据处理。
1. 路谱采集
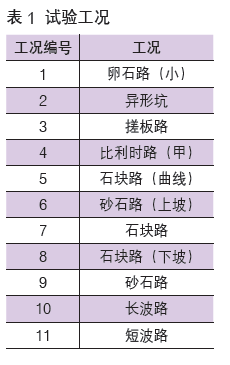
货车驾驶室路谱采集在定远试验场进行,表1列出了车辆在满载状态下路谱采集的11 种工况。如图2 所示,三向加速度传感器安装在驾驶室悬置车身端和车顶。传感器信号作为迭代目标信号和监控信号,共15 个通道。为了后期验证疲劳载荷准确性,在应力变化梯度小且敏感的区域还需粘贴应变花,应变花粘贴位置选择车身悬置安装点附近。

2. 数据处理
路谱采集的数据不能直接使用,首先要经过信号分析来探测干扰成分,然后使用合适的方法去除干扰。信号分析包括:时域分析、频域分析及统计分析。时域分析主要是通过肉眼判断信号中是否有毛刺和漂移成分;频域分析主要是通过观察频谱是否出现50Hz 电磁干扰;统计分析主要是通过统计信号的最值及均值等判断信号的合理性。数据处理则是使用滤波等方法去除干扰信号,为虚拟迭代提供可靠的目标信号。
刚柔耦合多体模型建模
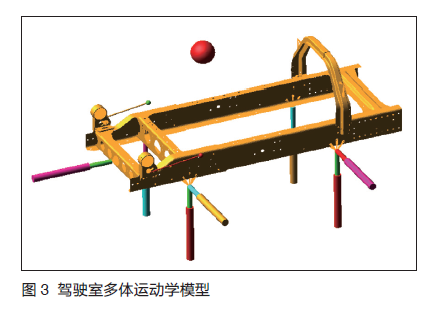
建立商用车驾驶室悬置系统多体动力学模型,如图3 所示。主要输入参数包括:硬点坐标、悬置刚度及阻尼、驾驶室质心及转动惯量。为了保证模型精度,车架使用柔性体,硬点坐标在CAD 数模中测量获取,其他参数全由试验获取。驱动模式为421 模式、4 个垂向驱动、2 个侧向驱动和1 个纵向驱动,可以实现驾驶室的六自由度运动。
虚拟迭代
虚拟迭代可以概括为用基于多体模型的线性传递函数解决非线性问题。系统响应(目标信号)来源于路谱采集试验。根据这些响应,虚拟迭代可以得到能产生相同响应的外部驱动。虚拟迭代主要包括三部分:系统识别、目标信号复现和收敛性评估。
1. 系统识别
系统识别首先要产生白粉噪声信号,对其幅值、衰减指数及频带进行定义。用白粉噪声信号去驱动多体模型进行仿真,得到路谱采集相应位置的加速度响应。系统的频响函数(FRF),可以通过下面的公式求得:
式中,H (jω ) 为频响函数;Gxy(jω ) 为输入与输出的互功率谱密度;G xx(jω ) 为输入的自功率谱密度。白粉噪声驱动(输入)的个数要小于响应的个数(输出),否则系统将是欠定的,计算不收敛。白粉噪声幅值和频带设置尽量靠近实际范围,这样可以使FRF 更接近真实系统特性且使迭代收敛更快。
2. 目标信号复现
理论上,外部驱动载荷是通过目标信号和传递函数进行逆计算得到的。实际中的机械系统都是非线性的,使用线性算法去解决非线性问题会产生误差,所以需要通过多步迭代去缩小误差,不断接近目标。迭代计算过程主要包括以下几步:①通过目标信号和传递函数的逆函数计算初始驱动信号;②通过初始信号驱动多体动力学模型得到第一步的响应;③比较第一步的响应和目标信号,计算误差。
根据误差修正驱动信号进行下一步迭代,迭代原则如下:
式中,U k+1(jω ) 为第k+1 次迭代的驱动;U k(jω ) 为第k 次迭代的驱动;α 为安全系数(控制响应信号的误差补偿的权重);Y D(jω ) 为目标信号;Y k(jω ) 为第k 次迭代仿真得到的响应。
3. 收敛性评估
理论上, 迭代计算时, 一个非线性系统需要通过线性公式模拟,才能达到更高的精度。对比仿真响应与目标信号的吻合度、评估收敛性,主要从时域、频域和相对伪损伤比三个方面进行。
时域通过均方根误差(RMSe)进行收敛性评估,计算公式如下:
式中,RMS 为均方根误差;RMSe(Y D-Y K) 为目标信号与仿真响应信号差的均方根值;RMS(d esired) 为目标信号的均方根值。
频域通过对比功率谱密度(PSD)进行收敛性评估。相对伪损伤比,通过对比仿真响应与目标信号的伪损伤进行收敛性评估,计算公式如下:
式中,D amage 为相对伪损伤比;D iteration 为迭代仿真响应的伪损伤;D desired 为目标信号的伪损伤。RMSe 越接近零且μ 越接近1,说明迭代精度越高。因为误差不能避免,一般RMSe<20%、0.5<D amage<1.5 就认为迭代精度较高,满足工程分析要求。
4. 迭代仿真
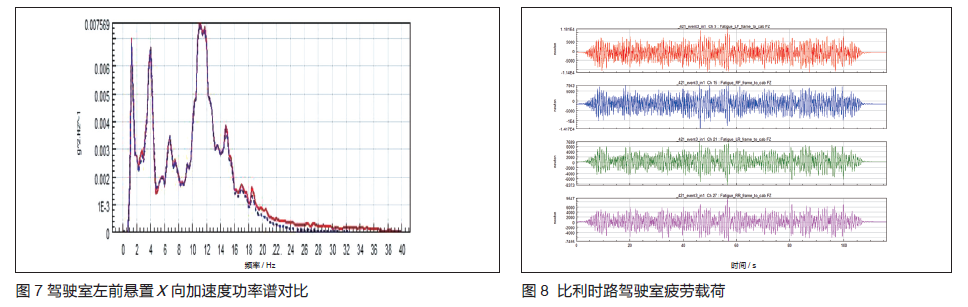
Femfatlab 软件联合Adams多体动力学模型进行虚拟迭代工作。驾驶室多体动力学模型使用7 个外部驱动激励(输入),输图3 驾驶室多体运动学模型出为15 个与路谱采集对应位置的加速度。在虚拟迭代过程中,收敛性满足期望值的最后一次迭代的驱动,即为需要的外部驱动载荷。比利时路迭代结果如图4 ~ 7 所示。其中,RMSe 和Damage 都满足要求,仿真和路谱试验的时域信号和功率谱密度基本吻合。

疲劳载荷分解及验证
11 种道路工况迭代完成后,用得到的驱动信号驱动多体动力学模型进行仿真,分解各个工况下驾驶室悬置处的载荷,如图8 所示。将疲劳载荷、驾驶室FE 模型单位载荷计算结果及材料S-N 曲线输入到nCode 软件,如图9 所示。计算虚拟应变,并与实测应变进行对比。如果吻合度较好,说明仿真分解的疲劳载荷较好。搓板路某通道应变对比结果如图10 所示,仿真与实测应变吻合度较好。

总结
联合路谱采集、多体模型、有限元分析和虚拟迭代进行驾驶室疲劳载荷分解,通过虚拟应变和实测应变对比验证了疲劳载荷的准确性,说明这种分解驾驶室疲劳载荷的方法合理可信,缩短了车辆的开发周期,节约了成本。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论