基于DCT域的公路车牌定位算法
1 引 言
( : V ehic le L icense PlateRecognit iON) 系统作为一个专用的计算机视觉系统,能够自动摄取车辆图像并识别出车牌。这个系统可应用在公路自动收费、停车场管理、失窃车辆侦察、门卫系统、智能交通系统等不同场合。汽车牌照定位是车牌识别的难点, 因此, 公路算法的研究有着重要而实用意义。车牌识别在图像处理技术中是典型的先分割目标进而识别的应用实例。类似的应用包括信封上邮政编码的分割与识别、货运列车车型车号的自动分割和识别、文字的识别等等。虽然车辆牌照识别系统是一个针对车牌识别的专用系统, 然而对它的研究定会对上述类似问题的研究起到推动作用。
关于车牌定位已有很多方法提出, 如基于数学形态学的定位方法:基于颜色的定位方法 , 这种方法主要利用彩色空间的信息, 实现车牌定位, 包括彩色边缘算法、颜色距离、相似度算法和基于边缘的颜色对方法等; 基于遗传算法提取汽车牌照的方法:基于神经网络的车牌定位方法。
针对各种车牌定位算法的优缺点, 提出基于DCT变化的车牌定位算法, 该方法在DCT 数据中,提取出一种基于加权频率的车牌区新特征, 然后经过自适应阈值分类, 采用基于投影法的车牌区分割方法, 直接在DCT 域实现车牌的快速定位。该方法可使定位矩形框紧凑地包围车牌区域, 有效降低误检率, 且运算复杂度较低, 有利于实现复杂背景中车牌的快速定位。
2 车牌定位算法
2. 1 离散余弦变换
离散余弦变换( DCT )是利用傅立叶变换的对称性, 采用图像边界褶翻操作将图像变换为偶函数形式, 然后对这样的图像进行二维离散傅立叶变换, 变换后的结果将仅包含余弦项, 故称之为离散余弦变换。DCT可以将图像描述为不同幅值和频率的正弦值之和的形式。对于一幅典型的图像, DCT 有这样的性质: 许多有关图像的重要可视信息都集中在DCT变换的一小部分系数中。
一个M N矩阵A 的二维DCT定义如下:
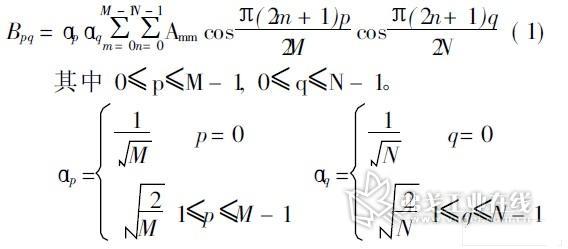
数值Bpq称为A 的DCT系数。DCT是一个可逆变换, 逆变换的定义如下:
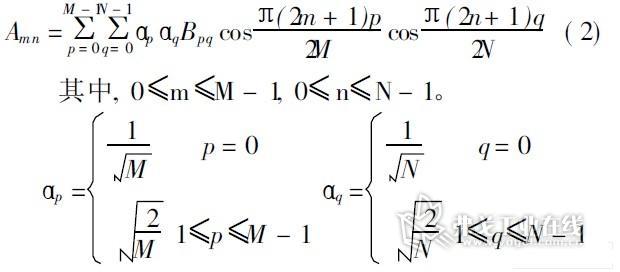
DCT逆变换方程可以理解为: 任意M N 的矩阵A 都可以写成M N 个如公式( 3)所示的函数之和的形式:
这些函数被称为DCT基本函数。
2. 2 基于DCT 域的特征提取
对于彩色图像, 图像预处理部分首先将输入的图像去掉彩色, 进行灰度化。利用RGB 空间到灰度的转换公式得到车牌的灰度图像, 即:

其中, f ( x, y )为( x, y )位置像素的灰度值, R ( x,y )、G (x, y )、B ( x, y )为输入彩色图像在( x, y )位置像素的红、绿、蓝颜色对应的彩色信息。
预处理后的图像经DCT 变换后所得到的系数位置及其幅值所反映的是该变换图像的空间频率及其能量。这里, 将图像划分为子块, 子块的大小为8 8, 对每个8 8的子块进行DCT 变换使其能量按频率集中, 得到的64个变换系数, 分别代表对应不同基波频率分量的大小。
若将8 8的DCT系数划分为0区、1区、2区、3区等4个区域, 则每个区域代表不同纹理的方向:0区表示的是直流分量(即8 8子块的平均值) , 1区表示的是竖向纹理(即水平方向的频率变化), 2区表示的是斜向纹理(即斜向的频率变化) , 3区表示的是横向纹理(即竖直方向的频率变化)。
由于车牌字符区域具有特殊的线条结构, 它基本上可归为横向、竖向、斜向的线条组合。在图像中, 这些线条主要显示出特殊的纹理特点, 其灰度与背景相差较大, 即边缘变化较剧烈, 且表现出明显的竖向、斜向、横向纹理特征。而在DCT 域中则主要表现为在图的1、2、3区的中高频部分的系数值较大, 即竖向线条的变换系数主要集中于1区, 斜向线条的变换系数主要集中于2区( 1区与3区也有一定的分布) , 横向线条的变换系数主要集中于3区,这是图像所含车牌字符在DCT 域中所表现出的纹理特征。可见, 车牌字符区所具有的特殊结构使其在DCT 域能够表现出更为丰富的中、高频DCT 分量。同时, 车牌字符区在表现出明显的方向性信息。综合考虑上述两点, 用一种基于DCT子块的加权频率特征(W eighted Frequency, WF) , 通过对不同方向DCT 分量进行非线性加权增强, 如公式( 5)所示, 从而使车牌字符区特征更加明显。













![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论