汽车车道偏离系统的实车测试方案研究
LDW系统功能的评价方法进行研究
随着汽车保有量越来越大,以及汽车电子化进程进一步深化,用户对于汽车智能化配置的要求也越来越高。市场上的车型呈现出智能化配置多样化的趋势。驾驶辅助系统(主动安全系统)也逐步成为新车装备的选择。主动安全系统区别于传统的基于事故发生后进行驾驶员、乘客保护的被动安全系统,主动安全系统利用摄像头或毫米波雷达等传感机构采集实时信息并通过各种算法进行识别,预测到危险场景时对驾驶员有声光提醒,保障驾驶员、乘客和其他交通参与者的安全。
LDW定义及基本要求
LDW(Lane Departure Warning)系统通过前视摄像头采集行驶车道的标识线,通过图像处理获得汽车在当前车道中的位置参数,当检测到汽车偏离车道时,传感器会及时收集车辆数据和驾驶员的操作状态,之后由控制器发出警报信号,为驾驶者提供更多的反应时间。而如果驾驶者打开转向灯,正常进行变线行驶,那么车道偏离预警系统不会做出任何提示。系统功能实现架构如图1。
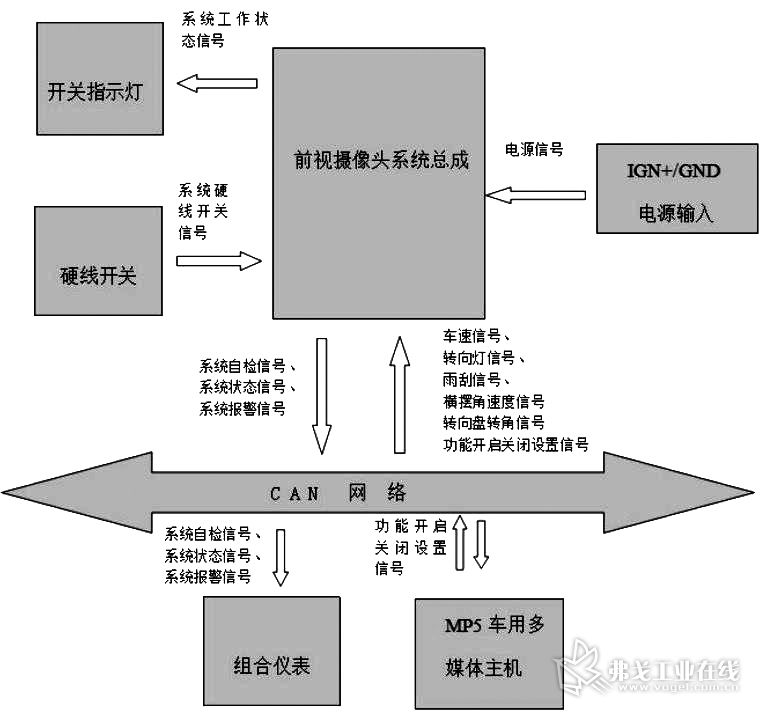
图1 系统功能实现架构
车道偏离报警系统的基本要求是至少应具有下列功能:监测系统状态,包括系统故障、系统失效、系统的开/关状态(如果有开关);向驾驶员提示系统当前的状态;探测车辆相对于车道边界的横线位置;判断是否满足报警条件;发出报警。
LDW系统测试条件及原理
LDW系统分为I和II两类如表1所示。系统应至少在其中一种弯道曲率条件下报警。
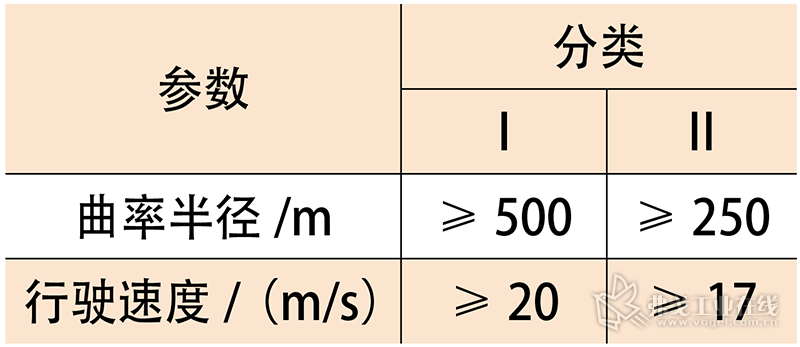
表1 系统分类
测试环境条件应该满足如下要求:测试地点:干燥平坦的沥青或混凝土路面;测试温度范围:-20℃~40℃;测试路面上的可见车道标识应状态良好和水平能见度应大于1 km 测试过程中应遵循如图2所示的方案。根据系统的功能对实车进行小范围的改装,在试验样车上加装车载工控机、摄像头、毫米波雷达、GPS、总线测试工具等设备,记录车外的环境场景、车内总线通信以及车内HMI界面的显示。
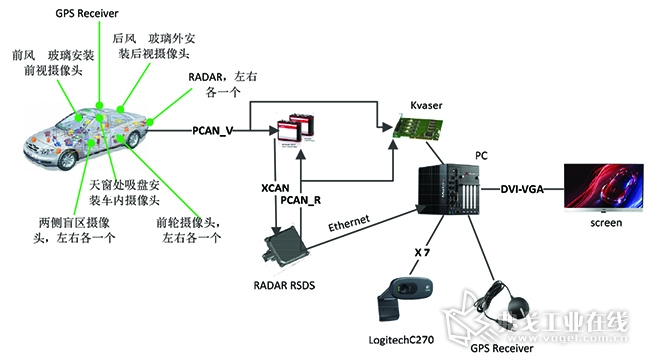
图2 测试硬件
LDW系统评价指标及测试策略
根据LDW模块功能性能要求,行业目前对LDW的评价指标不统一,除了Euro-CAP、CN-CAP等法规要求外,各大主机厂均是根据自身的需求来确定评价指标,一般主机厂对于LDW系统的功能评价是基于百公里报警次数来评价的,故多数都是依赖于实车道路测试来实现评价的。 因此要求我们对于实车测试的场景全面识别并且进行实车、实地测试。
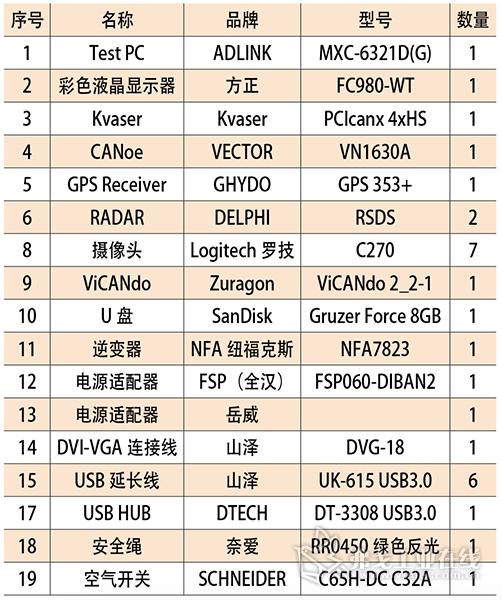
表2 测试设备详解
关于测试策略。首先依据不同的道路类型和不同的光线天气情况,将规划的测试历程进行划分,道路类型包括城市道路、乡村道路、高速公路几类,光线天气分为早晨、白天、傍晚、黑夜和特殊天气(雨雪、雾霾等),然后在每个道路类型下设计各类测试场景,如表3所示。

表 3 不同路况的测试策略(单位:km)
动态路试分类:测试工作按大纲进行,道路测试分类具体有:正常车道线识别能力测试、路面抗干扰能力测试、强光识别能力测试、光线变化识别能力测试、夜间识别能力测试、天气识别能力测试;其需重点关注的场景:1、路面抗干扰能力,例如路面的车道线变模糊,或者路面有深色的痕迹,均会使摄像头出现误识别的情形,出现漏报或者误报警等;2、强光识别能力(光线变化识别),例如在经过隧道时,摄像头会对光线的骤变产生不识别的情况,导致漏报等。以上用于考察LDW正常性能和鲁棒性,同时也是对LDW系统的功能开发更加明确地要求,从而做到系统的全面性、稳定性。
结论
随着汽车产品智能化配置逐渐丰富,作为自动驾驶的过渡阶段,ADAS系统在整车上的应用越来越广泛,因此要求对此的测试要更加深入和严谨。本文首先对LDW的定义和功能进行了介绍,然后对此系统的是策划测试方案进行研究,根据法规要求及开发车型的功能要求进行探究,从而测试并进行系统的评价。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论