美国主流机构网联自动驾驶虚拟仿真研究及测试深度调研
MobilityTrend(MT)对美国代表性的传统汽车试验场、网联自动驾驶测试场、高校交通研究中心、行业机构的网联自动驾驶虚拟仿真研究及测试进行了深度调研,与自动驾驶公司聚焦基于场景的虚拟仿真测试不同的是,这些机构更多地专注于网联自动驾驶共性技术、前沿技术、专项问题的仿真研究及测试,并且大多获得车企及其他业界组织的赞助或合作研究。
本文为《美国主流机构网联自动驾驶虚拟仿真研究及测试深度调研报告》节选——
NADS:驾驶员为自动驾驶做好准备了吗?
美国国家高级驾驶模拟器(National Advanced Driving Simulator ,NADS)是爱荷华大学工程学院的交通安全研究中心。在政府和行业的资助下,NADS利用其世界级的驾驶模拟器和仪器化的公路车辆,为私营和公共部门进行研究。国家公路交通安全管理局(NHTSA)在此拥有NADS-1模拟器,爱荷华大学负责操作和维护。
NADS致力于使车辆技术更安全、更易于使用。针对自动驾驶,NADS将人因工程学和心理学的专业知识与多模态研究工具相结合,结合高保真驾驶模拟器和道路研究车辆,研究人与自动驾驶车辆技术之间的关系,应对从自适应巡航控制到全自动驾驶等不同级别的车辆自动化带来的挑战。
以下是NADS 2020年以来自动驾驶相关研究项目:
1、控制权切换(Transition of Control,TOC)
研究问题:界面设计如何影响自动驾驶车辆控制权的切换?信息传递的时间和顺序如何影响从自动模式到人工模式控制权的切换?
赞助方:国家公路交通安全管理局(NHTSA)
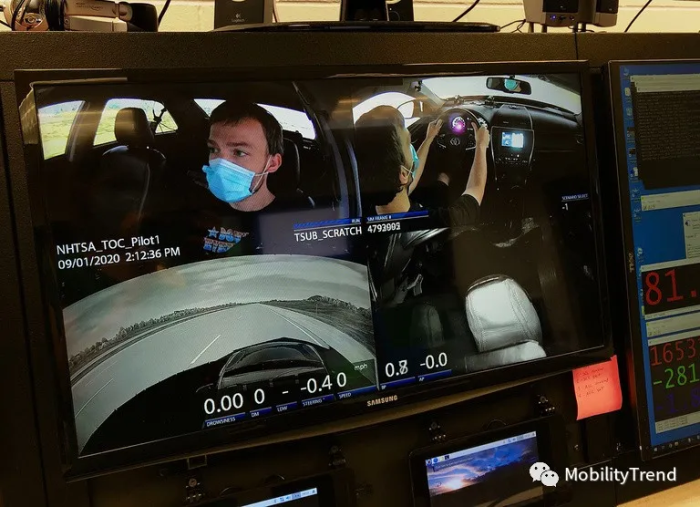
方法:该项目是NADS-1模拟器中第一个在模拟的交通拥堵环境中观察驾驶员行为的项目,称为“交通拥堵自动驾驶——在低速拥堵驾驶条件下的车辆控制。NADS正在研究控制权的正常切换和自动模式无法达到预期的情况。
利用模拟器独特的运动能力,研究人员不仅可以识别驾驶员是否能够接管控制权,还可以对接管的质量进行评估。研究人员正在发现安全和不安全之间的界限,NADS高保真度的模拟器有助于实现这一目标。
下一步:作为NHTSA赞助的一系列TOC研究的组成部分,NADS 2020年秋季获得了145万美元奖金,用于研究:需要多长时间建立足够的态势感知、安全地恢复人工驾驶?切换时间过短会造成哪些风险?安全转换最有效的界面和警报设计是怎样的?
2、控制驾驶研究

研究问题:驾驶员从无需驾驶操作的自动模式切换到人工控制需要多快?
赞助方:丰田协同安全研究中心
方法:在一条退役的机场跑道上,共有 155 名受试者在以Autopilot模式行驶的Tesla Model S75D内从事不同的非驾驶任务(如发短信或使用汽车界面)。Autopilot 设定在某个时间点关闭,研究人员比较驾驶员切换到驾驶控制的速度。
合作与成果:该项目的视频数据被加州大学圣地亚哥分校用于开发计算机视觉算法,其将根据驾驶员眼睛、手和脚的所在位置对接管的准备程度进行分类。
下一步:作为驾驶员建模研究的一部分,NADS的研究人员已在模拟器中重新创建了事件。接下来他们会对在机场跑道和模拟器环境的接管时间进行比较。
3、汽车技术心理模型
研究问题:驾驶员如何理解自适应巡航控制影响驾驶性能?
赞助商和合作伙伴:AAA交通安全基金会、SAFERSIM、马萨诸塞大学阿默斯特分校
方法:首先采用问卷调查法,对用户对自适应巡航控制(ACC)的理解进行评价,并根据用户的理解情况对其进行分组。接下来,研究人员对比了NADS-1模拟器的驾驶性能,他们在模拟器中重现了丰田ACC。
结果:对ACC有很强理解的受试者在系统未检测到前方物体时反应较早。由于系统行为的不确定性,对系统理解不好的人更容易发生碰撞,因为他们往往会等待车辆是否会做出反应。
下一步:该项目的第二年将跟踪配备ACC的车辆的新车主,以探索用户在与技术的初始交互过程中对技术的理解如何随时间而变化。

4、用户体验
研究问题:人们喜欢更保守或更激进的自动驾驶车辆?系统行为如何影响驾驶员对技术的信任和感知?
赞助商:Hyundai
方法:该项目利用NADS-1独特的运动功能,创建了两种自动驾驶行为模型:激进性系统和保守性系统。主观评分和眼球追踪数据都被收集。
调查结果:用户更喜欢那些行为保守(比如加速较慢)的自动驾驶系统,而不是咄咄逼人行为的自动驾驶系统。在两种模型中,舒适和信任度都随着时间的推移而增加。
NADS重点仿真设施
Springfield
——世界首个大规模、多用途驾驶仿真环境
——面向网联自动驾驶汽车研究的虚拟城市


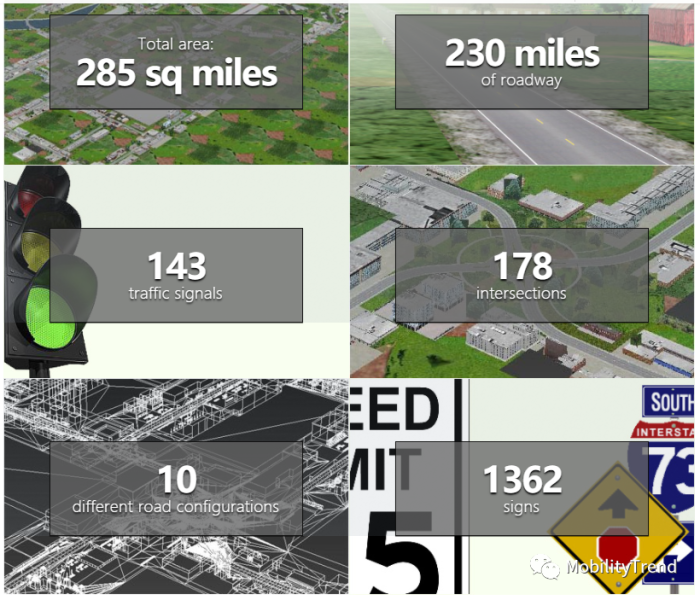
Springfield是一个285平方英里的虚拟试验场,复制了城市、郊区、住宅区、乡村公路和州际公路的外观和特点。逼真的驾驶环境包含基于AASHTO标准的道路、交叉口、交通信号、交通标志和车道标记。
Springfield的独特性:
● 广阔的驾驶环境,比芝加哥还大
● 易于更改和自定义
● 完全控制一天中的时间、天气和路况
● 完全控制其他交通和行人
● 能够使用不同的驾驶员和车辆重复地精确复制复杂事件
Sprigfield拥有超过230英里的直线道路,并配有逼真的标志、交通信号和车道标记。其设计旨在复制一天中任何时间、任何照明条件,以及任何路况和天气条件(能够模拟干燥、潮湿、结冰和下雪等天气)下的城市驾驶体验。
230英里的道路,包含以下区域:
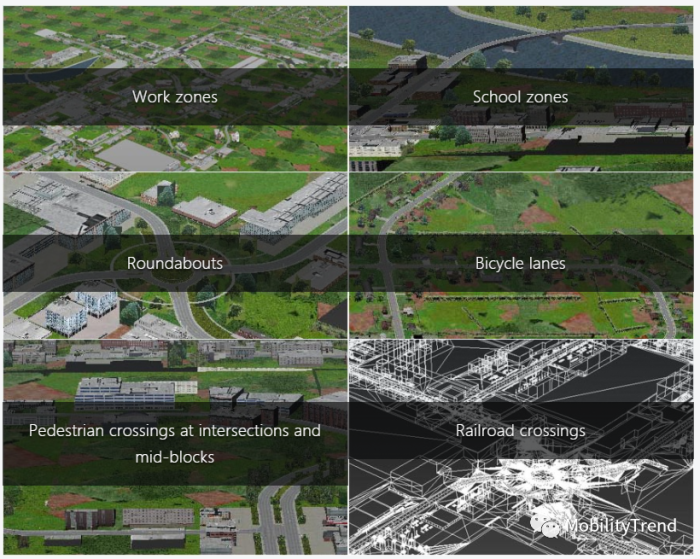
Springfield易于修改,以适应不断变化的需求。其可以控制交通、协调行人、添加标志、更改建筑立面、调整车道标线、调整路面特性,甚至增加新的道路和交叉路口。
Springfield有现实的交通,包括汽车、卡车、摩托车、自行车,以及各种公用事业和服务车辆,驾驶员周围可以创建不同密度的交通流。可以命令交通中的个别车辆保持特定的行驶和跟踪距离。默认情况下,交通遵循道路规则,对驾驶员做出充分反应,个别车辆亦可被命令超速、闯红绿灯、在没有信号的情况下转弯等方式违反道路规则。
Springfield有现实的行人沿人行道和人行横道行走。行人也可以被命令过马路,并在特定的时间和距离与车辆互动,这样就可以模拟行人和车辆之间的复杂交互作用。可以指定每个行人的性别、年龄和服装。
Springfield将实现复杂交通事件的模拟,从而更好地理解网联和自动驾驶技术。
NADS-1 Simulator

NADS-1是世界上保真度最高的模拟器之一。连接到驾驶室的4个液压执行器产生模拟路感的振动。24英尺高的圆顶安装在偏航环上,偏航环可以将圆顶绕其垂直轴旋转330度。X-Y组件通过移动大约64英尺×64英尺的间隔产生横向和纵向加速度。NADS-1运动系统能够为驾驶员提供逼真的运动提示,使驾驶员能够感觉到加速、制动和转向,并体验通常与关键驾驶事件相关的极限操纵。
圆顶内的驾驶室可以是全尺寸汽车、运动型多用途车、卡车或拖拉机驾驶室。驾驶室包括眼动跟踪、头部跟踪和座椅姿态传感系统,提供有关驾驶员性能和舒适度数据。可安装可选的辅助任务显示器以更改驾驶员工作负载。方向盘、踏板和座椅还能够提供触觉反馈以模拟警告系统。

NADS-1使用16个高清LED投影仪在圆顶内壁上无缝成像,从而形成360度水平和40度垂直视野。驾驶员通过所有窗户和镜子看到投射的情景,感到沉浸其中。

NADS-1夜间城市驾驶
NADS的所有模拟器使用相同的驾驶环境,包括城市、郊区、乡村公路和州际公路等设置,以及白天和夜间全天候的驾驶条件。NADS也有能力模拟新的地区或提供特定地理位置的现实模拟。














![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖