基于5G 网络的车辆远程驾驶场景研究
远程驾驶是一种基于5G 网络“高带宽、低时延”的特性,将车载摄像头、雷达等传感器采集到的车辆周围场景信息传输到驾驶舱,驾驶员据此进行判断并操作实现远程控制汽车的新兴技术。该技术可用于车辆的远程控制场景,尤其是在恶劣环境和危险区域以及车辆发生紧急状况时的远程监管,在未来具有广泛的应用场景。本文介绍了一种基于5G 网络实现远程驾驶的技术方案,阐述了驾驶员根据车端回传视频和车辆状态数据进行操作,经驾驶舱采集驾驶行为信息传输到车端后通过解析执行,实现远程精准操控车辆的详细过程。
系统方案
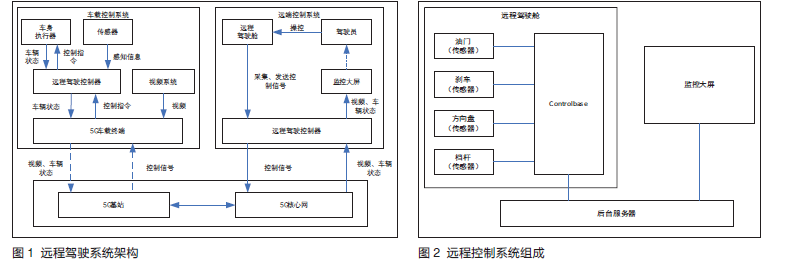
本文介绍的远程驾驶方案主要包括远端控制系统和车载控制系统两大模块(图1)。远程驾驶舱内的驾驶员根据监控屏幕上显示的车端回传视频与车辆状态信息进行操作,其驾驶行为经驾驶舱采集后转换为驻车、加速踏板、换档和转向信号,处理打包后通过后台服务器和5G 通信组网,发送给远程驾驶车辆搭载的5G车载终端后到达车端控制器,经控制器对信号进行解析计算后,将执行指令发送给车端执行器,实现了车端与驾驶端之间数据的低时延传输。
各端方案介绍
1. 远端控制系统组成及方案
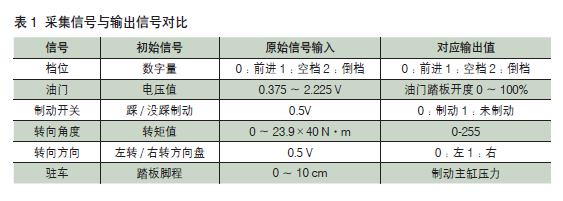
远端控制系统由监控大屏、远程驾驶舱和后台服务器组成,负责采集处理驾驶员行为信息发送给远程驾驶车辆,并将车端回传的视频数据与车辆状态信息进行处理后在大屏上展示(图2)。
(1)监控大屏
监控大屏与后台服务器之间通过ETH 连接,用于展示服务器中运行的远程驾驶云平台界面,为驾驶员提供车端的视频和车辆信息。
(2)远程驾驶舱
远程驾驶舱由远程驾驶操作所需的汽车零部件如方向盘、制动踏板、油门踏板、档杆、底层采集系统、controlbase 和相关线束组成。驾驶员根据监控大屏上显示的车端回传视频与车辆状态信息,在驾驶舱内对远端车辆进行操作,其中加速、换档、制动和转向这四种行为信息,经对应的传感器采集原始信号后发送给controlbase,在其中经过设置好的算法将转化为对应的油门踏板开度、档位信息、制动主缸压力和方向盘转角,具体对应关系见表1,然后再进行打包处理发送给后端控制服务器。
(3)后台服务器
本文方案中驾驶端的后台服务器需要与远程驾驶舱、监控大屏基于ETH 连接,并通过具有固定IP 地址的专线,连接运营商核心网与车端的5G 终端,基于5G 数据通道进行数据交互。其主要功能共分为四点:①处理视频数据,为降低视频传输时延,车端在回传视频前会对数据进行压缩处理,因此后台服务器接收到视频数据后首先需要进行解压后再解码处理;②解析车辆状态信息,车端回传的车辆状态信息包括车速、加速度、减速度和档位状态,但这些数据需要将报文信息在后台服务器中按照协议格式解析后,才可以转换为直观的整车状态数据;③发送控制指令,后台服务器采用具有固定IP 地址的专线直连运营商核心网,与车端搭载的5G 车载终端建立数据通路,实现一对一通信,可大大降低数据传输时延;④车端信息呈现,由于车端回传的数据共有四路摄像头和车辆的车速、档位等系列车辆状态信息,为了合理地在大屏上展示这些数据,使得驾驶员观感更贴近于实车驾驶。因此,在后台服务器中需要运行提前设置好的程序,对监控大屏上展示的UI 界面进行自定义设计。
2. 车端组成及方案
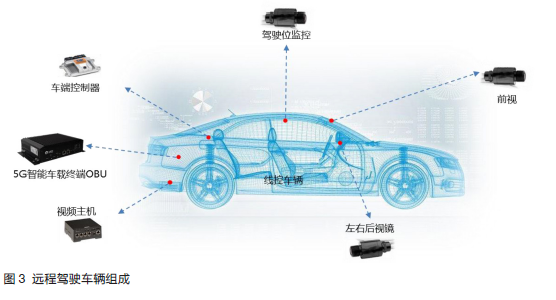
为实现该方案中远程驾驶车辆的安全行驶和驾驶员行为信息的准确执行,车载控制系统共包括远程驾驶控制器、5G 车载终端、车身执行器和车载视频系统等相关设备,车辆需基于自动驾驶车辆改造,具体如图3 所示。
(1)车载视频系统
车载视频系统由摄像头、交换机和视频处理器组成。
①摄像头
为了给远程驾驶舱内的驾驶员尽可能地提供接近现实情况的驾驶员视角,车辆搭载最高分辨率1 080 p 的4 路高清摄像头。用于采集远程驾驶车辆的行驶实况,其中三个分别布置在内后视镜和左右后视镜用于监控车辆前方和两侧的情况,最后在车内顶部布置一个用于监控驾驶员状态。
②交换机
由于视频处理器没有足够多的以太网接口,因此在摄像头与处理器之间需要添加一个四口百兆交换机用于视频数据中转。
③视频处理器
为了保证发送给驾驶舱的视频数据保持时间同步,需要在车端对视频进行统一处理。处理器对摄像头采集到的视频信号进行量化、采集、编码和压缩处理后,通过5G 网络传输到驾驶端的后台服务器再解压处理,最后利用部署在服务器中的远程驾驶平台通过监控大屏实时呈现。车载视频系统如图4 所示。
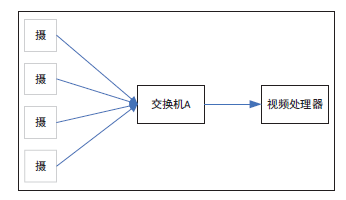
图4 车载视频系统
(2)5G 车载终端
本方案中远程驾驶车辆搭载的5G 车载终端采用华为5Gmodem MH5000-31 通信模组,主要负责视频回传、控制指令下发和车辆状态信息回传三大功能。通过在程序内设定访问地址,车载终端与具备固定IP 地址的后台服务器基于5G 组网建立数据传输通道,将接收到的远程控制指令通过ETH 下发至远程驾驶控制器,并将通过ETH 接收到的视频数据和车辆状态信息上传至后台服务器。
(3)远程驾驶控制器
本文方案中车辆搭载的远程驾驶控制器需要与5G 车载终端、传感器和被控车辆基于CAN 通讯进行交互,通过控制器中的车辆控制模块对接收到的信号进行处理,发送给被控车辆,执行远程驾驶命令,并加入安全行驶策略和人工介入模式保障行驶安全。其主要功能为四点:①远程控制指令解析,接收5G 车载终端发送的原始信号(如油门开度,制动压力等),将原始信号转换成被控车辆需要的控制信号(如加速度,减速度,方向盘转角等);②指令执行,将处理好的控制信号通过CAN 总线发送给远程驾驶车辆;③安全监测,监控执行器反馈的车辆状态信息与传感器反馈的车辆周边环境信息,加入人工介入策略、自动紧急刹停和安全限制策略,保证车辆驾驶安全;④信息反馈,将执行器反馈到的车辆状态信息发送给5G 车载终端。自动驾驶控制器方案如图5 所示。
车辆控制模块(图6):将远程驾驶舱采集的油门踏板开度和制动主缸压力通过实车标定的方法,转换成车辆控制所需的加速度和减速度。从驾驶舱采集的档位和方向盘转角信号不需要转换,可直接发送给车辆。
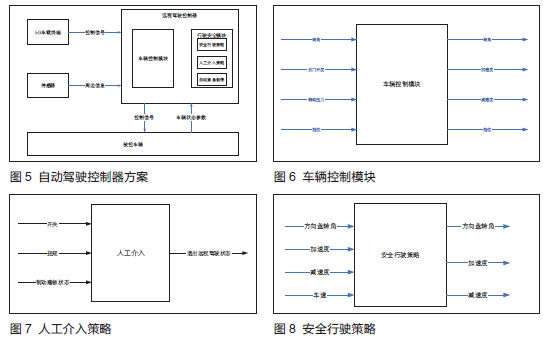
人工介入策略(图7):远程驾驶车辆共有人工驾驶和远程控制两种驾驶状态,车辆启动时初始状态默认为人工驾驶。进入远程驾驶模式需要同时满足以下三个条件:开关:远近光灯切换;转矩:方向盘转矩不大于2 N · m ;制动踏板:没有踩踏板。退出远程驾驶模式只需满足下列两个条件之一即可:方向盘转矩大于2 N · m 且持续150 ms ;踩制动踏板。
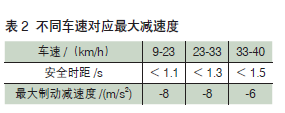
安全行驶策略(图8):①速度安全控制,限制车辆行驶速度与加速度,防止行驶或加速过快出现极限工况,而发生危险。限制车辆行驶速度不高于40 km/h,加速度在0 ~ 4 m/s2 范围内;②转向安全控制,限制车辆转角范围与转角速度,防止台架转向过大和过快,超出实车转向极限。限制方向盘最大转角为±500 °,最大转角速度400 ︵ ˚)/s;③制动安全控制,限制车辆的减速度,防止车辆刹车出现极限工况,减速度在0 ~ 8.0 m/s2。
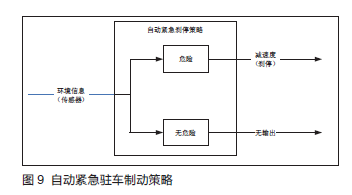
自动紧急驻车制动策略如图9 所示,根据传感器检测的障碍物信息,判断车辆响应远程端控制信号是否安全,若危险,则自动驻车制动。此处使用77 GHz 雷达作为传感器布置在车辆前保杠处,控制器中的自动紧急刹停模块根据雷达反馈的信息计算车辆与障碍物碰撞时间TTC,小于阈值时,则采取主动制动,进行驻车制动。阈值与制动压力根据车辆当前车速的不同而不同,见表2。
(4)车身执行器
远程驾驶车辆上搭载的执行器主要包括转向控制执行器、档位控制执行器、加速控制执行器和制动控制执行器。
转向控制执行器由转向机构、转向电机和转向电机控制器组成。当车辆处于自动驾驶状态且转向处于可接收被控指令时,转向电机控制器根据控制器发送报文中的转角值进行转向控制,控制电机转动带动车辆转向机构运行,最后实现转角的执行。
档位信息由核心电子控制单元控制器(VCU,vehicle controlunit)接收执行,电动车的档位输出信号为电信号模式,VCU只需接收远程驾驶控制器中的档位信息即可实现档位的切换。加速控制执行器由VCU 和电机组成。电动车的运动依靠电机的转动而实现,远程驾驶控制器中的加速请求和加速值信息发送给VCU 后,计算出电机需要的转速,通过控制电机转速实现对远程驾驶车辆的加速度控制。
减速控制执行器也称汽车电子稳定控制系统(ESC,electronic stability controller),它主要由电子控制单元(ECU,electronic control unit)、混合动力整车控制器(HCU,hybridcontrol unit)、管路、线束等组成。远程驾驶控制器将制动信号与制动减速度值发送给ESC,通过ESC 控制单元计算出合适的制动压力,控制ESC 管路加压,进行车辆的制动。
总结
本文详细介绍了一种基于5G 网络进行远程驾驶车辆的设计方案,对各端组成以及在整体方案中所起到的作用进行阐述,并对该方案中远程驾驶整体流程进行了完整描述,所述整体方案已在江淮iev 6S 车型上进行了实车测试(图10),过程中远程驾驶车辆需全程在5G 网络信号覆盖良好的范围内行驶。

从实际测试效果来看,该系统可以实现对千米距离外的远程驾驶车辆的操控,完成直线、转弯、换档和加减速等系列行为。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备12020067号-15 京公网安备110102001177号


获取更多评论