冲压车间机械手的可靠控制
倍福控制器基于PC控制技术的理念,具有优秀的控制性能和稳定的运行状态,使得其产品在自动化生产控制系统中的应用越来越广泛。本文主要介绍了倍福控制系统在冲压车间机械手自动化生产线上的应用。
长城汽车股份有限公司天津分公司整车装备事业部工厂位于天津滨海开发区西区,天津一期项目年产量为25万辆整车。该工厂包括四大工艺车间以及发动机、座椅等零部件配套子公司。其中,冲压车间采用压机自动化高速生产线,拥有A01、A02压机和机械手自动化线,B01压机和机器人自动化线,C01、C02多工位高速生产线及相关生产辅助设备。该冲压车间采用国际先进的生产线设备及国际知名品牌电气控制元件,并在设备上采用伺服及变频器控制,节能低耗,为生产制造高质量、高品牌和新颖的整车提供了强有力的保障。
在汽车四大工艺中,冲压车间的自动化生产线具有产品质量好、安全系数高、劳动强度低和生产效率高等诸多优点。自动化生产线主要采用机器人或机械手传输板料及成品制件。机械手单臂自动化线具有高速、稳定的运行方式,适合于大间距、大制件的压机生产线。随着公司新车型的增加、生产制件尺寸的变化,机械手在自动化线生产节拍中的优势日益突出。大型、高速的运行自动化生产线对于电气控制系统要求非常高。机器人电气控制系统一般采用西门子S7-300控制系统,机械手电气控制方案形式较多,通过各种应用方案的对比(系统性能参数、性价比和维护成本等方面),我们选择了济南新吉尔固德自动化有限公司的单臂机械手及倍福的控制系统。本文以车间冲压自动化生产线机械手控制系统为例,对倍福控制系统的特点和应用进行了具体阐述。
机械手系统
机械手能够模仿人体上肢某些动作功能,可以按固定程序抓取、搬运物件或操作工具的自动操作装置。机械手是在机械化、自动化生产过程中发展起来的一种新型装置,它可代替人的繁重劳动以实现生产的机械化和自动化,被广泛地应用于自动化生产线,能在有害环境下操作以保护人身安全。我公司冲压车间A01和A02线自动化生产线采用了瑞士GUDEL(坤戈)公司设计制造的机械手自动化传输系统。工艺设计要求机械手具有运动重复定位精度高、运动速度快、安全性能高和生产柔性化高等特点。根据生产工艺流程(见图1)、设备特性及现场使用要求,该生产线电气控制系统选用了倍福的工业PC C6240及TwinCAT PLC。
软硬件配置
1.硬件配置
PLC采用装机柜式工控机PC的模块化控制器,型号为C6240(见图2)。C6240与倍福的控制面板完善结合,Windows XP专业版下运行TwinCAT自动化软件,C6240工业PC为自动化线生产和设备安装工程应用提供了一个功能强大的平台。控制器本身集成配有一个7槽位机箱和一个ATX主板。CPU 2.0GHz处理器,内存可扩展到2GB,硬盘160G,6个PCI插槽和1个空闲的AGP插槽,用于最长190mm的插卡。主板集成了一块显卡和一个10/100MB的以太网适配器,无需占用插槽。另外,主板还带有4个RS232串行端口、2个USB 2.0端口,并带有显视器接口。薄型CD/DVD-ROM或Multi DVD 4.7GB驱动器可以作为选件提供。内部底盘可沿伸缩导轨向前拉出,便于轻松拆装所有固定组件。运动控制器本身集成双EtherNet接口,其中一个向上连接到现场工业以太网,接受运动控制的调用指令,另一个可以作为本地调试的网络接口。运动控制器、运动控制网络接口部件通过硬件实时的超高速以太网构成运动控制网络系统。

2.软件配置及编程环境
本控制系统采用基于PC的PLC和运动控制系统TwinCAT编程软件,完成对整线的控制、操作,DOTNET实现数据管理、归档。TwinCAT软件系统将任意一台兼容性PC变成一个实时控制器,该控制器拥有多台PLC、一个编程环境和一个操作站。TwinCAT可在Windows NT/2000/XP、NT/XP或Windows CE环境下运行。PC控制连接所有通用现场总线、PC接口,数据连接通过OPC开放标准实现。TwinCAT PLC是一种IEC 61131-3 PLC,每台PC均带有4个Run-Time系统,周期时间短(最小可达50ms)。
TwinCAT是一个包含了运行时(Run Time)和开发平台的自动化实时控制软件,在单个软件包里集成了带有PLC、NC、Real Time和System Manager功能的实时控制系统(见图3)。
TwinCAT PLC主要用于程序的开发及调试,具有先进的编程系统(强大的库管理器、在线调试)和先进的调试器(监视器、流程控制、采样跟踪、示波器、在线读写、强制和在线变更)。TwinCAT PLC支持不同的编程语言指令列表(IL)、结构文本(ST)、顺序功能图(SFC)、功能块图(FBD)和梯形图(LD)。
TwinCAT System Manager是TwinCAT系统中用于组态的主要工具,主要负责硬件组态与I/O映射,作为参与软件任务的输入和输出以及连接现场总线的物理输入和输出均由TwinCAT系统管理器管理。其开放性能可以支持所有的通信方式和现场总线(Lightbus、Profibus、Interbus、CANOpen、DeviceNet、Sercos、EtherNet TCP/IP和EtherCAT)。应于不同的协议,TwinCAT具有不同的实时性能。至于以太网,TwinCAT可使不同的以太网协议,具有良好的实时性。
3.力士乐控制器
力士乐伺服运动控制器可以实时调节大量的轴向运动,具有通信速率高、控制实时性好和抗干扰能力强等特点。力士乐控制器还可以通过开放的以太网络与倍福控制器开展实时通信,完全实现纵向集成和系统控制。其电子控制板上的参数能迅速以控制指令的方式得到实施,充分优化协调整个系统动作,实现交流伺服电动机的运动灵活。力士乐控制器既有控制复杂的运动特性,又可以准确调节伺服电动机的性能和功能,能够实现安全而准确的定位。控制器本体专门设计了抗振、耐冲击的部件,确保在冲压车间使用具有较高的可靠性。分布式控制驱动系统通过SERCOS总线实时与驱动器进行通信。力士乐伺服运动控制器的软件IndraWorks操作简便、易于操作人员掌握。
控制系统控制方案
1.总体控制方案
本系统包括线首拆垛部分、中间上下料机械手和线尾下料部分,各部分系统间的电气控制遵循“集中监控、分散控制”的原则。控制系统采用“监控层、控制层和设备层”的典型控制模式,每个层次中使用不同的网络结构及软硬件配置,以实现各自不同的功能。
2.机械手控制系统组成
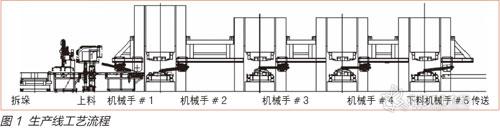
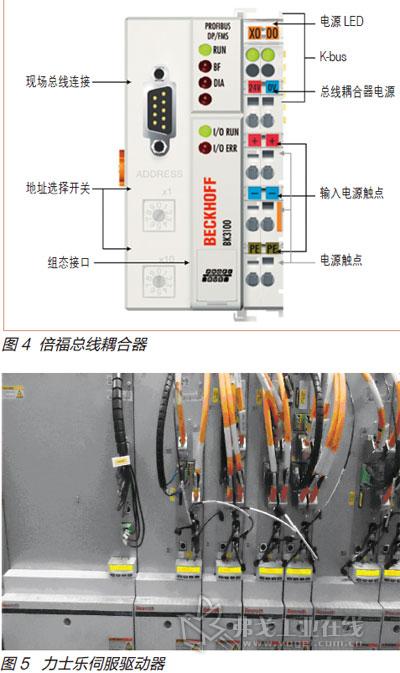
本线整体控制系统采用倍福PC控制器C6240,与整线控制通过实时以太网实现控制,工业以太网实现监控。每个机械手采用一套控制系统C6240,通过Profibus-DP总线连接倍福标准总线耦合器BK3100(见图4),使用远程I/O模块进行输入输出控制。驱动系统采用力士乐伺服驱动器(见图5)驱动伺服电动机,通过SERCOS实现每个机械手的重复高精度、高速度动作。倍福控制器通过Profibus-DP总线连接力士乐伺服驱动器,实时进行数据交换处理。安全控制系统CPU使用PSS 3006,通过SafetyBus总线连接现场I/O模块,实时进行安全点监测。倍福控制器通过Profibus-DP总线连接安全PLC,进行现场安全信息的监控及处理。机械手简单动作可以通过示教器进行操作,倍福控制器与示教器通过以太网通信。整线操作采用琴式操作站,倍福触摸屏安装在操作站上,机械手工作参数通过触摸屏存储和调试。
结语
该倍福控制系统已经在机械手自动化线上得到成熟应用,在使用过程中,我们发现倍福产品可靠性较高、价格相对较低、功能较强、速度较快且使用较为方便,可以实时控制现场机械手动作灵活性和精确度,可以方便地对现场参数进行监控、修改,使系统实时工作在最佳状态。本系统相对于其他控制系统,具有很大的参考性、较高的性价比以及可靠的操作性和维护性。系统的稳定性和实用性,极大地保证了生产的正常进行,提高了生产效率。倍福控制器与力士乐伺服驱动器的完美结合,对直线运动的位置、速度和加速度进行控制,实现单轴、多轴位置控制,对研究运动控制有一定的参考价值。
目前,该机械手自动化生产线在冲压车间运行平稳,倍福控制系统运行稳定,生产节拍可以达到10次/min,满足了生产的需求。由于编程语言与其他主流PLC的梯形图等编程语言不同,对维护人员的专业技能水平要求较高。












![]()
2001-2009 Vogel Industry Media版权所有 京ICP备09051372号 京公网安备110102001177号


跟帖
查看更多跟帖 已显示全部跟帖